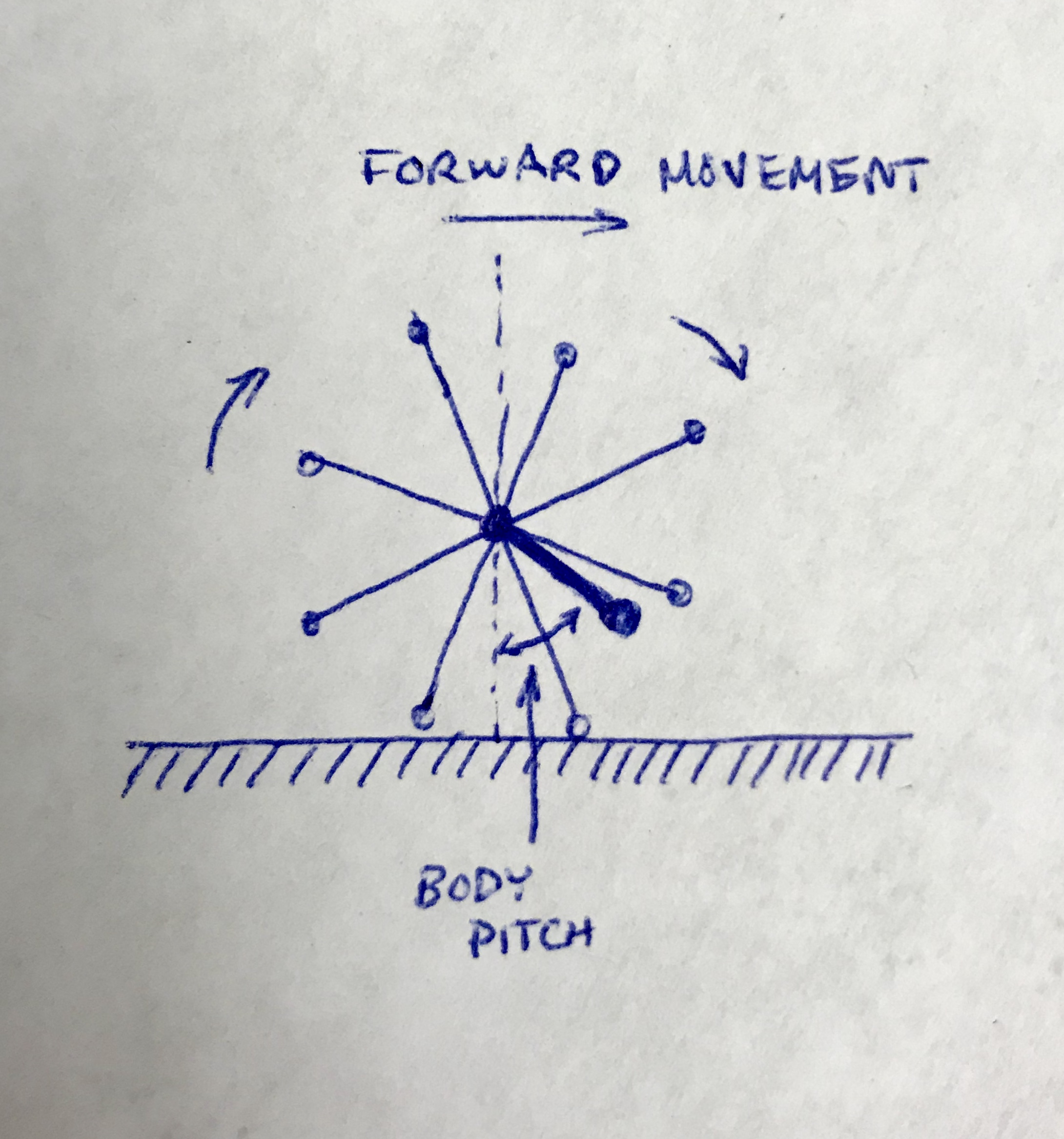
I am working on a robot, where I ideally need to use torque (current) to control the torso angle. It works okay, however there is very clear cogging as the motor tries to hit a specific angle. This leads to the PID controller going up and down between the cogging positions and not hitting the setpoint The reason why I cannot use position control is that the robot needs to control its body pitch while it’s moving forward. (Picture attached)
Is there a way to remove the cogging while in current control mode? As in use the anticogging feature that @Wetmelon developed?
Thanks,
Sebastian