Hi! everyone!
I’m currently building a four-wheel-legged robot. Here are the specs of the ODrive I use:
H/W : ODrive 3.6.56
S/W : 0.5.6 .
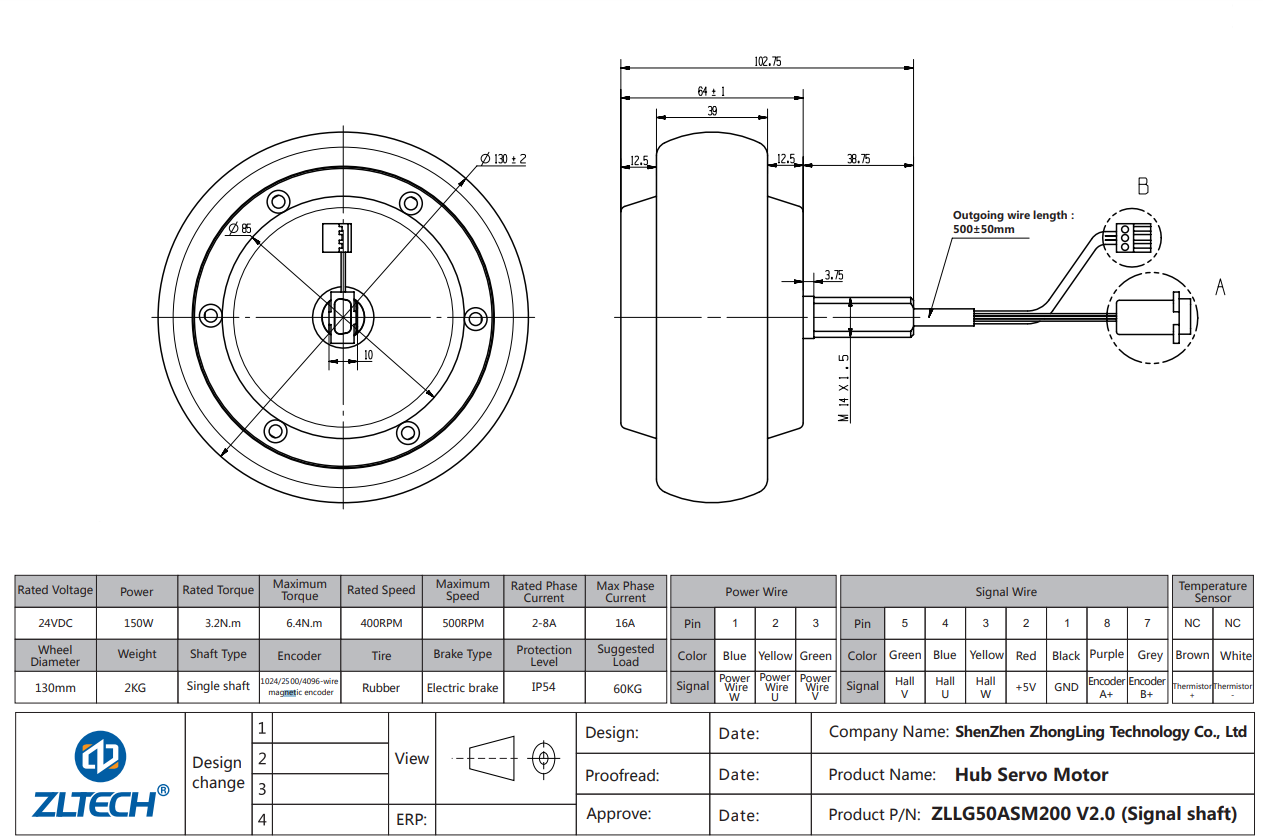
And i want a brake function, but the motor I am using does not have a mechanical brake. The motor reference indicates that the brake type is electric brake. How do I use this brake type in ODrive?
I hope the wheel doesn’t turn due to external force.
Thank you!
Hey Rltjd,
It doesn’t look like that motor has a built-in brake - if it did, the ODrive could drive it with an external MOSFET or relay.
It looks like the best option for position hold is just putting the ODrive in position control mode - with properly tuned PID gains, it should hold the motor quite well.
1 Like
Thank you for your answer!
so, electric brake means position control? right?
Yes, I’d generally mean that electric brake is just a cop-out by the manufacturers to avoid saying “no brake” haha ![]()
1 Like
Oh! haha
Thank you so much!