Hi All,
I am having a funny problem that I can’t seem to get to the bottom of.
Observations:
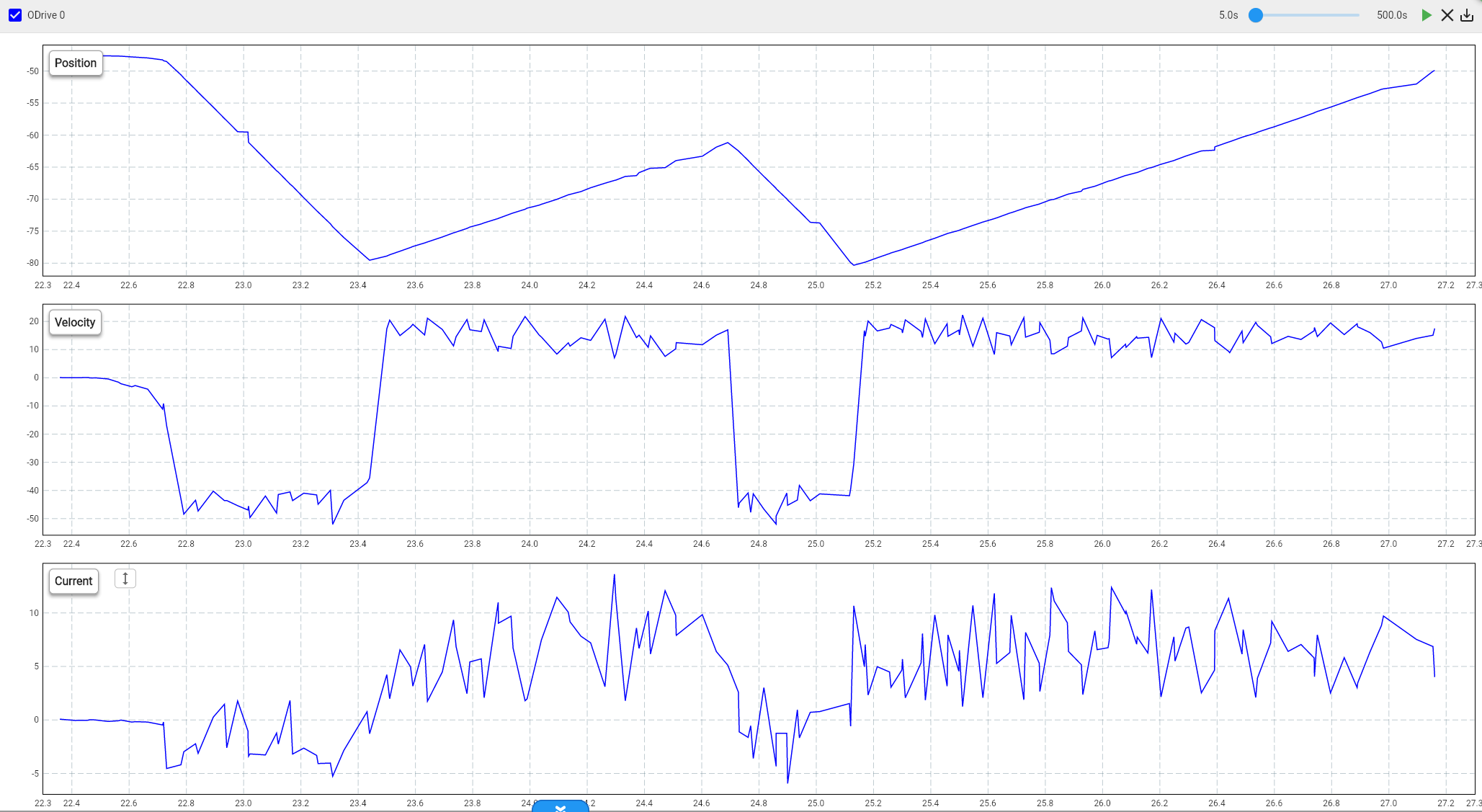
Torque and velocity of the motor is much higher in one direction but almost half in the other.
Running the motor in torque mode I can see the velocity and current consumption is asymmetric for each direction. On the slower direction the motor seems to be a little bit more jerky and vibrates. It is only at higher velocities that this behaviour occurs.
Actions:
I have tried changing the tuning parameters and the torque limit (min max) values to no change.
I have ensured there is not asymmetric forces on the motor, all loads are disconnected.
I have measured the phase resistance of each phase and they are all equal, so I don’t think there is damage.
Telemetry from GUI shows the asymmetric velocity and current consumption.
If anyone has an suggestions what might be causing this I would love some help.
Regards Lewis
Odrive Params:
{
“axis0.commutation_mapper.config.approx_init_pos”: 0.0,
“axis0.commutation_mapper.config.approx_init_pos_valid”: false,
“axis0.commutation_mapper.config.circular_output_range”: 1.0,
“axis0.commutation_mapper.config.circular”: true,
“axis0.commutation_mapper.config.index_gpio”: 7,
“axis0.commutation_mapper.config.index_offset”: 0.0,
“axis0.commutation_mapper.config.index_offset_valid”: false,
“axis0.commutation_mapper.config.offset”: -0.8073289394378662,
“axis0.commutation_mapper.config.offset_valid”: true,
“axis0.commutation_mapper.config.passive_index_search”: false,
“axis0.commutation_mapper.config.scale”: 7.0,
“axis0.commutation_mapper.config.use_endstop”: false,
“axis0.commutation_mapper.config.use_index_gpio”: false,
“axis0.config.I_bus_hard_max”: Infinity,
“axis0.config.I_bus_hard_min”: -Infinity,
“axis0.config.I_bus_soft_max”: Infinity,
“axis0.config.I_bus_soft_min”: -Infinity,
“axis0.config.P_bus_soft_max”: Infinity,
“axis0.config.P_bus_soft_min”: -Infinity,
“axis0.config.calib_range”: 0.019999999552965164,
“axis0.config.calib_scan_distance”: 8.0,
“axis0.config.calib_scan_vel”: 2.0,
“axis0.config.commutation_encoder_bandwidth”: NaN,
“axis0.config.commutation_encoder”: 5,
“axis0.config.dir_gpio_pin”: 9,
“axis0.config.enable_error_gpio”: false,
“axis0.config.enable_step_dir”: false,
“axis0.config.enable_watchdog”: false,
“axis0.config.encoder_bandwidth”: 1000.0,
“axis0.config.error_gpio_pin”: 10,
“axis0.config.index_search_at_target_vel_only”: false,
“axis0.config.load_encoder”: 5,
“axis0.config.startup_closed_loop_control”: false,
“axis0.config.startup_encoder_index_search”: false,
“axis0.config.startup_encoder_offset_calibration”: false,
“axis0.config.startup_homing”: false,
“axis0.config.startup_max_wait_for_ready”: 3.0,
“axis0.config.startup_motor_calibration”: false,
“axis0.config.step_dir_always_on”: false,
“axis0.config.step_gpio_pin”: 8,
“axis0.config.torque_soft_max”: 10.0,
“axis0.config.torque_soft_min”: -10.0,
“axis0.config.watchdog_timeout”: 0.0,
“axis0.config.anticogging.calib_bidirectional”: true,
“axis0.config.anticogging.calib_coarse_integrator_gain”: 10.0,
“axis0.config.anticogging.calib_coarse_tuning_duration”: 60.0,
“axis0.config.anticogging.calib_end_vel”: 0.15000000596046448,
“axis0.config.anticogging.calib_fine_dist_scale”: 1.0,
“axis0.config.anticogging.calib_fine_tuning_duration”: 120.0,
“axis0.config.anticogging.calib_start_vel”: 1.0,
“axis0.config.anticogging.enabled”: false,
“axis0.config.anticogging.max_torque”: 0.15000000596046448,
“axis0.config.calibration_lockin.accel”: 3.183098793029785,
“axis0.config.calibration_lockin.current”: 10.0,
“axis0.config.calibration_lockin.ramp_distance”: 0.5,
“axis0.config.calibration_lockin.ramp_time”: 0.4000000059604645,
“axis0.config.calibration_lockin.vel”: 6.36619758605957,
“axis0.config.can.bus_voltage_msg_rate_ms”: 0,
“axis0.config.can.encoder_msg_rate_ms”: 10,
“axis0.config.can.error_msg_rate_ms”: 0,
“axis0.config.can.heartbeat_msg_rate_ms”: 10,
“axis0.config.can.iq_msg_rate_ms”: 10,
“axis0.config.can.node_id”: 3,
“axis0.config.can.powers_msg_rate_ms”: 0,
“axis0.config.can.temperature_msg_rate_ms”: 0,
“axis0.config.can.torques_msg_rate_ms”: 0,
“axis0.config.can.version_msg_rate_ms”: 0,
“axis0.config.general_lockin.accel”: 20.0,
“axis0.config.general_lockin.current”: 10.0,
“axis0.config.general_lockin.finish_distance”: 100.0,
“axis0.config.general_lockin.finish_on_distance”: false,
“axis0.config.general_lockin.finish_on_vel”: false,
“axis0.config.general_lockin.initial_pos”: 0.0,
“axis0.config.general_lockin.ramp_distance”: 3.1415927410125732,
“axis0.config.general_lockin.ramp_time”: 0.4000000059604645,
“axis0.config.general_lockin.vel”: 40.0,
“axis0.config.motor.acim_autoflux_attack_gain”: 10.0,
“axis0.config.motor.acim_autoflux_decay_gain”: 1.0,
“axis0.config.motor.acim_autoflux_enable”: false,
“axis0.config.motor.acim_autoflux_min_Id”: 10.0,
“axis0.config.motor.acim_gain_min_flux”: 10.0,
“axis0.config.motor.acim_nominal_slip_vel”: 2.3399999141693115,
“axis0.config.motor.bEMF_FF_enable”: false,
“axis0.config.motor.calibration_current”: 1.0,
“axis0.config.motor.current_control_bandwidth”: 500.0,
“axis0.config.motor.current_hard_max”: 29.5,
“axis0.config.motor.current_slew_rate_limit”: 10000.0,
“axis0.config.motor.current_soft_max”: 15.0,
“axis0.config.motor.direction”: 1.0,
“axis0.config.motor.ff_pm_flux_linkage”: 0.0,
“axis0.config.motor.ff_pm_flux_linkage_valid”: false,
“axis0.config.motor.fw_enable”: false,
“axis0.config.motor.fw_fb_bandwidth”: 500.0,
“axis0.config.motor.fw_mod_setpoint”: 0.7786434292793274,
“axis0.config.motor.motor_model_l_d”: 0.0,
“axis0.config.motor.motor_model_l_dq_valid”: false,
“axis0.config.motor.motor_model_l_q”: 0.0,
“axis0.config.motor.motor_type”: 0,
“axis0.config.motor.phase_inductance”: 0.0008448847220279276,
“axis0.config.motor.phase_inductance_valid”: true,
“axis0.config.motor.phase_resistance”: 0.6882449388504028,
“axis0.config.motor.phase_resistance_valid”: true,
“axis0.config.motor.pole_pairs”: 7,
“axis0.config.motor.power_torque_report_filter_bandwidth”: 8000.0,
“axis0.config.motor.resistance_calib_max_voltage”: 5.0,
“axis0.config.motor.sensorless_observer_gain”: 1000.0,
“axis0.config.motor.sensorless_pll_bandwidth”: 1000.0,
“axis0.config.motor.sensorless_pm_flux_linkage”: 0.0,
“axis0.config.motor.sensorless_pm_flux_linkage_valid”: false,
“axis0.config.motor.torque_constant”: 0.08705262839794159,
“axis0.config.motor.wL_FF_enable”: false,
“axis0.config.sensorless_ramp.accel”: 31.83098793029785,
“axis0.config.sensorless_ramp.current”: 10.0,
“axis0.config.sensorless_ramp.finish_distance”: 15.915493965148926,
“axis0.config.sensorless_ramp.finish_on_distance”: false,
“axis0.config.sensorless_ramp.finish_on_vel”: true,
“axis0.config.sensorless_ramp.initial_pos”: 0.0,
“axis0.config.sensorless_ramp.ramp_distance”: 0.5,
“axis0.config.sensorless_ramp.ramp_time”: 0.4000000059604645,
“axis0.config.sensorless_ramp.vel”: 63.6619758605957,
“axis0.controller.config.absolute_setpoints”: false,
“axis0.controller.config.circular_setpoint_range”: 1.0,
“axis0.controller.config.circular_setpoints”: false,
“axis0.controller.config.commutation_vel_scale”: 1.0,
“axis0.controller.config.control_mode”: 1,
“axis0.controller.config.enable_gain_scheduling”: false,
“axis0.controller.config.enable_overspeed_error”: true,
“axis0.controller.config.enable_torque_mode_vel_limit”: false,
“axis0.controller.config.enable_vel_limit”: false,
“axis0.controller.config.gain_scheduling_width”: 0.0010000000474974513,
“axis0.controller.config.homing_speed”: 0.25,
“axis0.controller.config.inertia”: 0.0,
“axis0.controller.config.input_filter_bandwidth”: 20.0,
“axis0.controller.config.input_mode”: 1,
“axis0.controller.config.pos_gain”: 80.00000762939453,
“axis0.controller.config.spinout_electrical_power_bandwidth”: 20.0,
“axis0.controller.config.spinout_electrical_power_threshold”: 10.0,
“axis0.controller.config.spinout_mechanical_power_bandwidth”: 20.0,
“axis0.controller.config.spinout_mechanical_power_threshold”: -10.0,
“axis0.controller.config.steps_per_circular_range”: 1024,
“axis0.controller.config.torque_ramp_rate”: 0.009999999776482582,
“axis0.controller.config.use_commutation_vel”: false,
“axis0.controller.config.use_load_encoder_for_commutation_vel”: false,
“axis0.controller.config.vel_gain”: 0.06614172458648682,
“axis0.controller.config.vel_integrator_gain”: 0.04955029487609863,
“axis0.controller.config.vel_integrator_limit”: Infinity,
“axis0.controller.config.vel_limit”: 10.0,
“axis0.controller.config.vel_limit_tolerance”: 10.0,
“axis0.controller.config.vel_ramp_rate”: 100.0,
“axis0.enable_pin.config.debounce_ms”: 50,
“axis0.enable_pin.config.enabled”: false,
“axis0.enable_pin.config.gpio_num”: 11,
“axis0.enable_pin.config.is_active_high”: false,
“axis0.enable_pin.config.offset”: 0.0,
“axis0.interpolator.config.dynamic”: true,
“axis0.max_endstop.config.debounce_ms”: 50,
“axis0.max_endstop.config.enabled”: false,
“axis0.max_endstop.config.gpio_num”: 0,
“axis0.max_endstop.config.is_active_high”: false,
“axis0.max_endstop.config.offset”: 0.0,
“axis0.mechanical_brake.config.gpio_num”: 0,
“axis0.mechanical_brake.config.is_active_low”: true,
“axis0.min_endstop.config.debounce_ms”: 50,
“axis0.min_endstop.config.enabled”: false,
“axis0.min_endstop.config.gpio_num”: 0,
“axis0.min_endstop.config.is_active_high”: false,
“axis0.min_endstop.config.offset”: 0.0,
“axis0.motor.motor_thermistor.config.beta”: 0.0,
“axis0.motor.motor_thermistor.config.enabled”: false,
“axis0.motor.motor_thermistor.config.gpio_pin”: 3,
“axis0.motor.motor_thermistor.config.r_ref”: 0.0,
“axis0.motor.motor_thermistor.config.t_ref”: 25.0,
“axis0.motor.motor_thermistor.config.temp_limit_lower”: 100.0,
“axis0.motor.motor_thermistor.config.temp_limit_upper”: 120.0,
“axis0.pos_vel_mapper.config.approx_init_pos”: 0.0,
“axis0.pos_vel_mapper.config.approx_init_pos_valid”: false,
“axis0.pos_vel_mapper.config.circular_output_range”: 1.0,
“axis0.pos_vel_mapper.config.circular”: false,
“axis0.pos_vel_mapper.config.index_gpio”: 7,
“axis0.pos_vel_mapper.config.index_offset”: 0.0,
“axis0.pos_vel_mapper.config.index_offset_valid”: false,
“axis0.pos_vel_mapper.config.offset”: 0.0,
“axis0.pos_vel_mapper.config.offset_valid”: false,
“axis0.pos_vel_mapper.config.passive_index_search”: false,
“axis0.pos_vel_mapper.config.scale”: 1.0,
“axis0.pos_vel_mapper.config.use_endstop”: false,
“axis0.pos_vel_mapper.config.use_index_gpio”: false,
“axis0.trap_traj.config.accel_limit”: 0.5,
“axis0.trap_traj.config.decel_limit”: 0.5,
“axis0.trap_traj.config.vel_limit”: 2.0,
“can.config.baud_rate”: 250000,
“can.config.protocol”: 1,
“config.dc_bus_overvoltage_trip_level”: 50.0,
“config.dc_bus_undervoltage_trip_level”: 10.5,
“config.dc_max_negative_current”: -100.0,
“config.dc_max_positive_current”: 100.0,
“config.enable_uart_a”: false,
“config.gpio0_mode”: 17,
“config.gpio10_mode”: 17,
“config.gpio11_mode”: 17,
“config.gpio12_mode”: 17,
“config.gpio13_mode”: 17,
“config.gpio14_mode”: 17,
“config.gpio15_mode”: 17,
“config.gpio16_mode”: 17,
“config.gpio17_mode”: 17,
“config.gpio18_mode”: 17,
“config.gpio1_mode”: 17,
“config.gpio2_mode”: 17,
“config.gpio3_mode”: 17,
“config.gpio4_mode”: 17,
“config.gpio5_mode”: 17,
“config.gpio6_mode”: 17,
“config.gpio7_mode”: 17,
“config.gpio8_mode”: 17,
“config.gpio9_mode”: 17,
“config.max_regen_current”: 0.0,
“config.uart0_protocol”: 3,
“config.uart_a_baudrate”: 115200,
“config.usb_cdc_protocol”: 3,
“config.user_config_0”: 0,
“config.user_config_1”: 0,
“config.user_config_2”: 0,
“config.user_config_3”: 0,
“config.user_config_4”: 0,
“config.user_config_5”: 0,
“config.user_config_6”: 0,
“config.user_config_7”: 0,
“config.gpio15_analog_mapping.endpoint”: null,
“config.gpio15_analog_mapping.max”: 0.0,
“config.gpio15_analog_mapping.min”: 0.0,
“config.gpio16_analog_mapping.endpoint”: null,
“config.gpio16_analog_mapping.max”: 0.0,
“config.gpio16_analog_mapping.min”: 0.0,
“config.gpio8_pwm_mapping.endpoint”: null,
“config.gpio8_pwm_mapping.max”: 0.0,
“config.gpio8_pwm_mapping.min”: 0.0,
“config.gpio9_pwm_mapping.endpoint”: null,
“config.gpio9_pwm_mapping.max”: 0.0,
“config.gpio9_pwm_mapping.min”: 0.0,
“config.inverter0.current_hard_max”: 150.0,
“config.inverter0.current_soft_max”: 100.0,
“config.inverter0.drv_config”: 9029553772700800,
“config.inverter0.mod_magn_max”: 0.8651593923568726,
“config.inverter0.shunt_conductance”: 1999.9998779296875,
“config.inverter0.temp_limit_lower”: 83.95999908447266,
“config.inverter0.temp_limit_upper”: 103.11000061035156,
“config.motor_fan.enabled”: false,
“config.motor_fan.lower”: 70.0,
“config.motor_fan.upper”: 80.0,
“config.odrv_fan.enabled”: false,
“config.odrv_fan.lower”: 70.0,
“config.odrv_fan.upper”: 80.0,
“hall_encoder0.config.edge0”: NaN,
“hall_encoder0.config.edge1”: NaN,
“hall_encoder0.config.edge2”: NaN,
“hall_encoder0.config.edge3”: NaN,
“hall_encoder0.config.edge4”: NaN,
“hall_encoder0.config.edge5”: NaN,
“hall_encoder0.config.edges_calibrated”: false,
“hall_encoder0.config.enabled”: false,
“hall_encoder0.config.hall_polarity_calibrated”: false,
“hall_encoder0.config.hall_polarity”: 0,
“hall_encoder0.config.ignore_illegal_hall_state”: false,
“hall_encoder1.config.edge0”: 0.18060302734375,
“hall_encoder1.config.edge1”: 0.24976350367069244,
“hall_encoder1.config.edge2”: 0.0,
“hall_encoder1.config.edge3”: 0.0,
“hall_encoder1.config.edge4”: 0.0,
“hall_encoder1.config.edge5”: 1.1479437019748901e-41,
“hall_encoder1.config.edges_calibrated”: false,
“hall_encoder1.config.enabled”: true,
“hall_encoder1.config.hall_polarity_calibrated”: false,
“hall_encoder1.config.hall_polarity”: 0,
“hall_encoder1.config.ignore_illegal_hall_state”: false,
“inc_encoder0.config.cpr”: 8192,
“inc_encoder0.config.enabled”: false,
“inc_encoder1.config.cpr”: 8192,
“inc_encoder1.config.enabled”: false,
“rs485_encoder_group0.config.mode”: 0,
“spi_encoder0.config.baudrate”: 1687500,
“spi_encoder0.config.biss_c_bits”: 18,
“spi_encoder0.config.delay”: 0.0,
“spi_encoder0.config.max_error_rate”: 0.004999999888241291,
“spi_encoder0.config.mode”: 2,
“spi_encoder0.config.ncs_gpio”: 17,
“spi_encoder1.config.baudrate”: 1687500,
“spi_encoder1.config.biss_c_bits”: 18,
“spi_encoder1.config.delay”: 0.0,
“spi_encoder1.config.max_error_rate”: 0.004999999888241291,
“spi_encoder1.config.mode”: 0,
“spi_encoder1.config.ncs_gpio”: 17
}