I am trying to run the motor at a very low speed (0.16 r/s) in VELOCITY_CONTROL mode. The motion is currently very jittery and not smooth.
I attempted to tune the Velocity P and I gains manually, but it did not significantly improve the smoothness. I suspect Anticogging is required, but I am unable to complete the calibration process successfully.
When I run start_anticogging_calibration(), the motor moves slowly step-by-step as expected. However, right before completing the full revolution (near the end of the cycle), the motor suddenly surges (accelerates rapidly) and throws an error.
I tried to manually set the axis state to IDLE right after the surge. Although the calibration state flags seemed to change, the motion remained rough, which suggests the calibration data was not correctly applied or saved.
Here are my current PID and config settings:
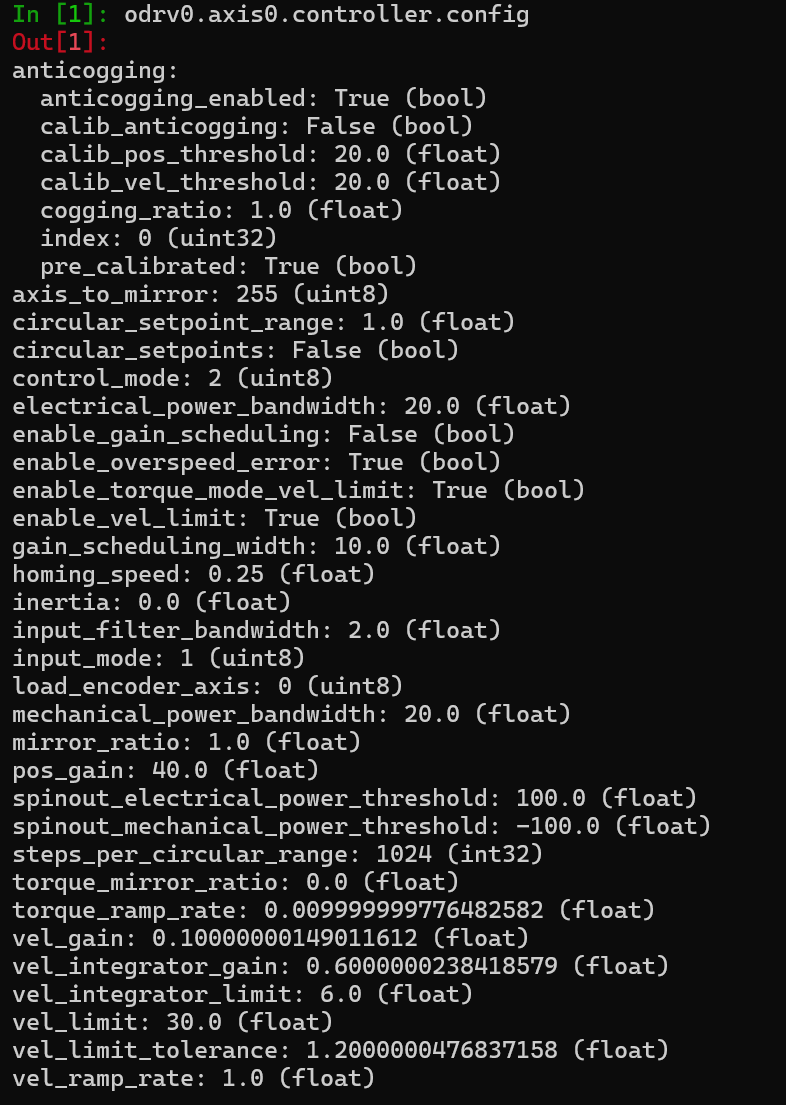
Any suggestion would be appreciated.