Hi ODrive community,
I used ODrive about a year ago for a haptic feedback school project. Set myself up with the V3.6 board (running whatever firmware was current at the time), a Turnigy Multistar 9235-100 motor (100Kv). Got it up and running, and it worked beautifully. Fast forward to the present day, and i’m trying to resurrect it for another project.
The ODrive connects to my PC just fine, and runs the motor through the calibration sequence perfectly with no errors. However, when I try to put the motor in closed loop control, the motor doesn’t try to “fight” like it’s supposed to. I had it working a year ago so I know what it should feel like. If I give it a setpoint, it doesn’t move. I checked all my configured values and tuned values and they are all unchanged from when the motor was working. The ODrive doesn’t throw any errors or freeze up- I can put the motor into idle or calibrate it again. I am using a different power supply with a digital display running the ODrive at 20V, and it only shows about 0.060A of current draw in closed loop- contrast that with ~2.1A of current draw during the calibration sequence. This problem seems most similar to the one encountered by varkala_yashwanth here: Closed_loop_control problem
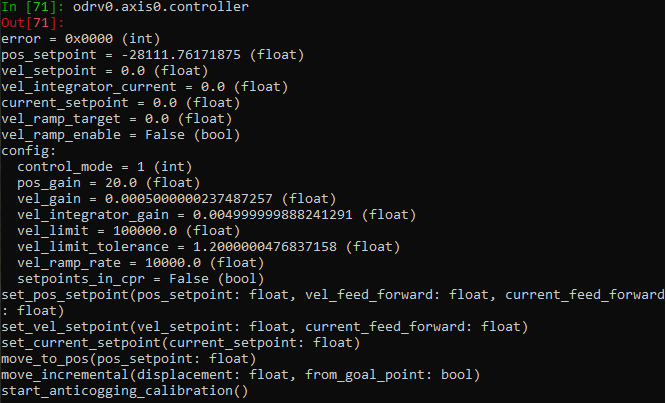
I changed my torque constant to 1 like he did but stil got the same “limp” closed loop control problem.
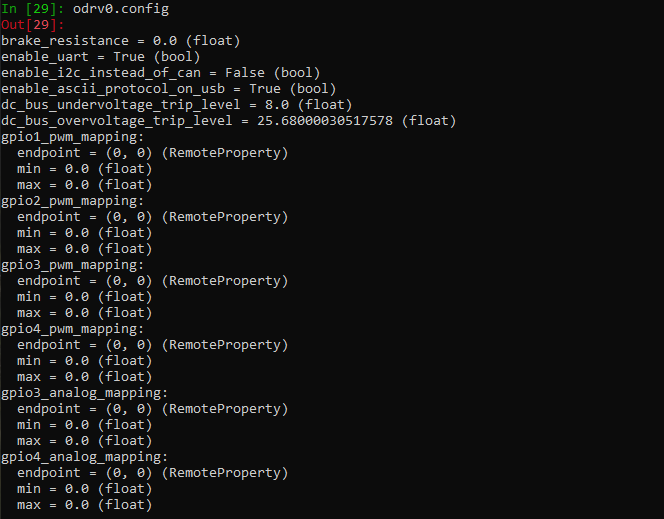
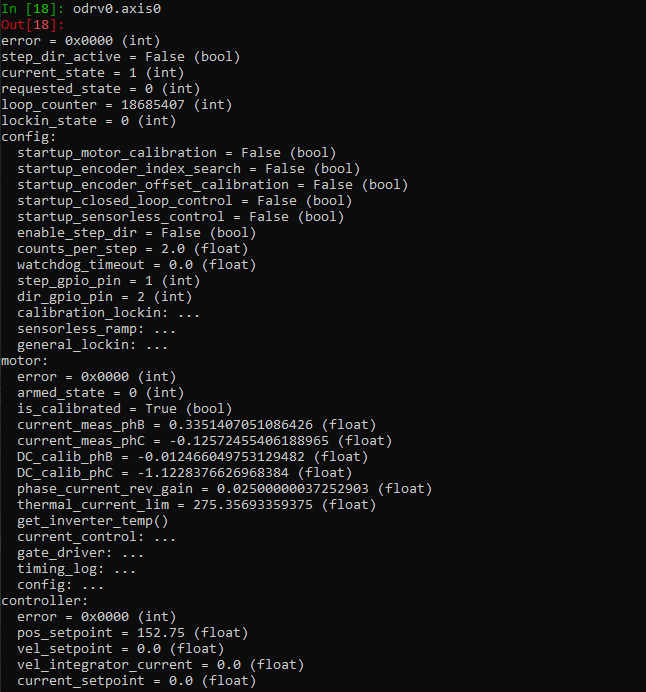
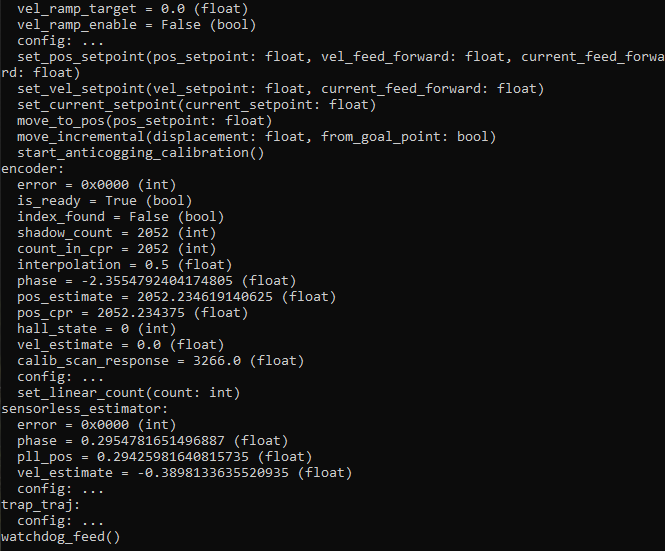
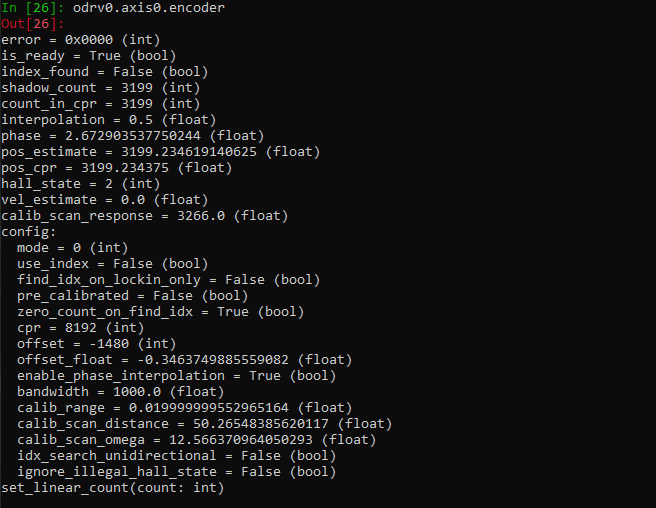
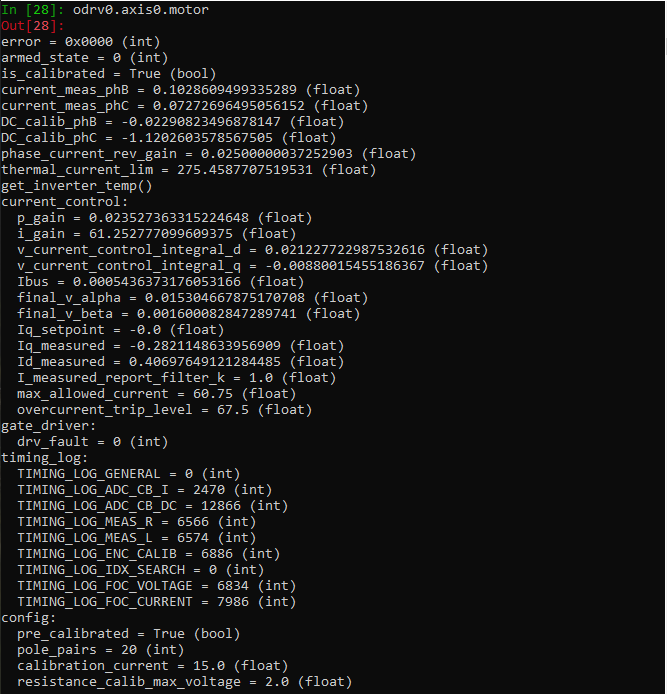
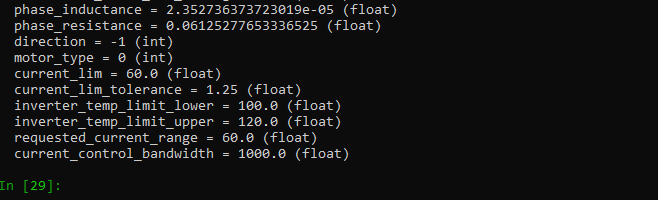
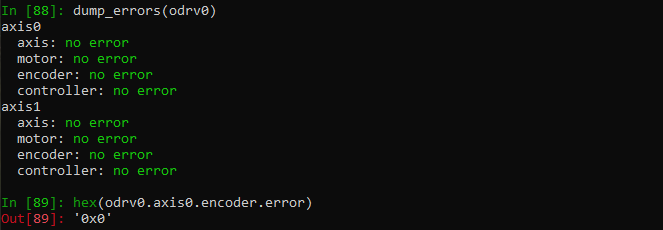
I feel like i’m missing something obvious here, but I’m stuck because the ODrive indicates all is well, and the calibration sequence is perfect. I’ve changed my tune around, and updated to firmware v0.5.1, but still encountered this problem. I’ll comment below this with screenshots of my settings, as it looks like new users can only embed one thing. Any help is appreciated. Thanks!