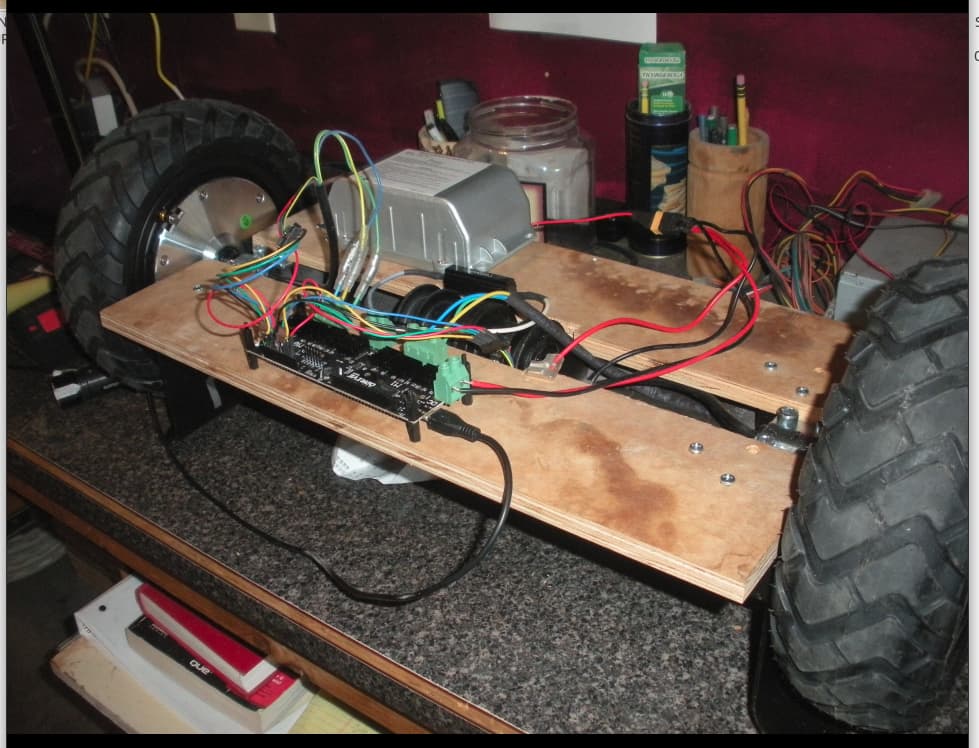
I have a four wheel drive robot that I call Donkey. My intention is to make it aid in taking care of
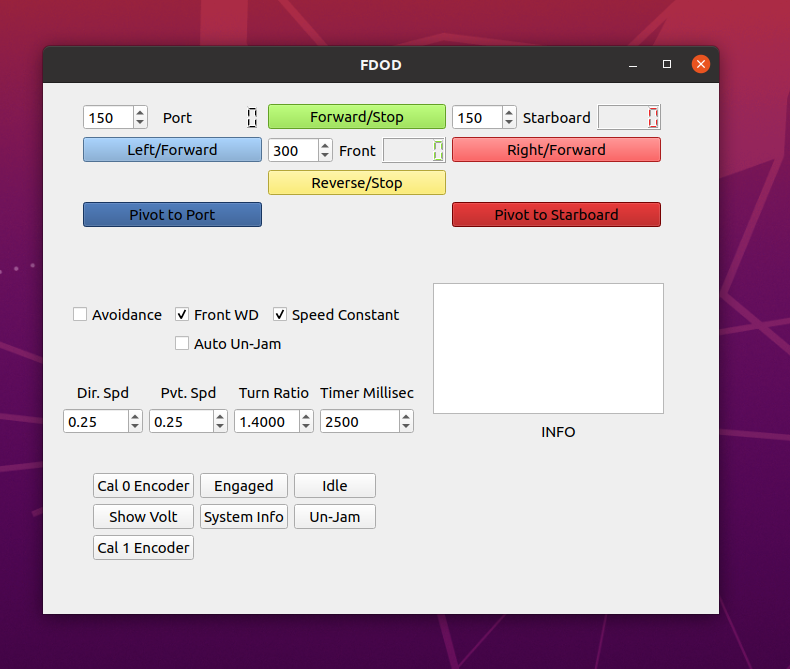
1.5 acres of vineyard and other outside chores. Right now the four wheel drive consist of 4 wheel chair brushed motors being driven by (2) 2x60 Sabertooth motor controllers. The controllers are both controlled by a single Jetson Nano. The Nano has an M.2 slot which accepts WiFi adapter and I can run the Donkey headless with a gui I developed using Qt. The tires on the wheel chair motors are 13" tiller tires.
I would like to eventually convert my wheel chair motors to BLDC hoverboard wheels with aggressive
field tread. Are BLDC wheels with aggressive tread available?
Also would 2 Odrives be able to handle the wheels directly or do I need to consider gear
reduction?
I have just acquired a new Odrive and am going to build a small house robot using two 6.5" hover
board wheels and two non driven caster wheels. The community has me spooked concerning ground
loops so I am ordering an Adafruit USB isolator. Will this work?
I maybe going overboard on this small unit but when I port my design to the field Donkey, hopefully it will be seamless!
Since I am new to the community is there already a project similar to mine?
My golf cart has the same size wheel, so that should work. The shipping is more than wheel and then they talk about tariff and customs, I will keep them in mind. In the mean time I will get used to the Odrive.
Hi Andy
I am working on a one person golf cart.
I use two 800 watt 13 inch non gear hubmotors.
A arduino and a BNO 055 to provide differential steering And control the Yaw
What is your project like?
Till now It is difficult to get the two motors reacting the same way. I wonder if open loop is not better.
Grt paul
I’m not familiar with BNO 055.
Is there a chance to see your Arduino code?
My Donkey uses USB serial communication between Jetson Nano and motor controllers they run
very efficiently.
Do your wheel tires have an aggressive tread as my project has to be able to pull 300 lbs up
steep hills. May I ask where you purchased them?
Hi Andy
The BNO055 is a IMU AND I use the yaw to control that my cart is going straight when I don’t want to change direction. This part of the soft is already working. I will give you the code later on as I did not do a road test yet. Till now I build only a very poor proto to test the software. I am designing the real model for the moment. The BNO I learned from toptechboy.com Mr Paul Mc Worther. Very good tutorial!!! A must see.
I will send you the wheel details when I am home.
On trip for the moment.
Send you also some pictures.
Greetings from Belgium
Paul
This depends more on the motor than the drive.
Make sure you pick motors which have the required maximum torque.
The torque constant (Nm/A) is not always specified, especially for hobby motors, but it is inversely proportional to the velocity constant Kv. (rpm/V)
In general, for a traction motor you should choose the lowest KV value for your maximum speed and available voltage.
On my wheel chair motor donkey I am now running 6 gauge wire on the power bus. I went to 6 gauge after I cooked a 10 gauge wire. Off the power bus the two motor controllers are fed with 10 gauge wire. The motors looked to be 14-12 gauge. All wires are stranded. The wheel chair motors are rated for 24 volts which I use now. I may have used a single 12 volt battery when I cooked the 10 gauge wire?? Not real sure.
I turn on the wheel chair motor donkey with a rated 70 amp switch
The last time I physically checked the wires for heat they felt warm but acceptable. The wires were cooler than the motors.
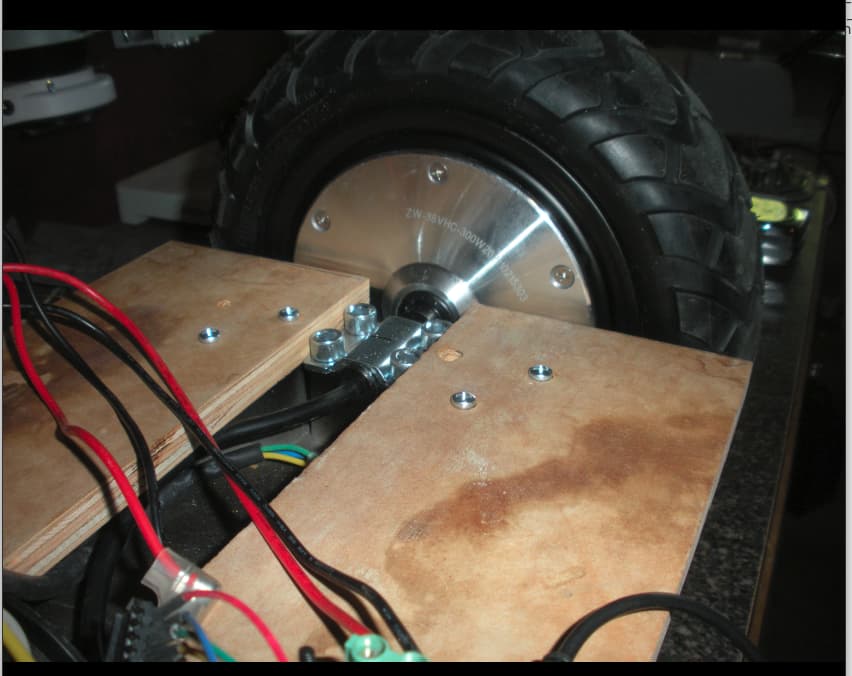
Is it possible to replace the brushed DC motor in the pictures below to a BLDC motor with an encoder?
The motor comes off the gear box via two allen screws. The motor has a male slotted shaft that fits into the female receptacle that has a spline that fits into the motor slot. Measurements seem to be SAE versus metric. The gear box is 24-1 reduction.
It should be pretty easy to machine the slotted shaft that you need out of a piece of steel bar, then you just need to adapt that onto the motor. You might be able to 3D print a coupling from one of the default ODrive motors onto your machined bar.
A 3D printer would also come in handy for adapting the motor flange onto your gearbox.
How much torque does the motor have / need to have?
The shaft diameter on the brushed motor is 5/16" (8mm I think) looks like the same size as D5065 - 270kv if I read the specs correctly. May look around for shaft adapter.
As far as torque goes I only know that these motors and original wheels were made to handle 300 lb.
person on a house ramp. A little more checking and I will make a decision, but I’m leaning towards the D5065 - 270kv so far.
I have now started my third donkey project called “Field Donkey” (FD). Bought an all-terrain hoverboard with 27" wheelbase which should go through my door way with rubbing the door jamb which my original donkey did . I removed the internals.
I configured one wheel for hall sensors with odrivetool using optoisolator on my desktop PC, that went well. On the second wheel I had problems and it jump around and vibrated like crazy. Finally compared odrv0.axis0.controller.config to odrv0.axis1.controller.config and found vel_integrator_gain on axis1 = 74 (bad) and axis0 = 4.6518754959106445 (good). I copied axis0 value to axis1 then saved the configuration and things are running smooth for now. I ran the test setup using my program below and it went well.
The motors on this hoverboard are 300 watts each so I will be monitoring my heat sinks and probably will install fans. Question: is there a temp sensor on Odrive 56v? Also is there a high resolution encoder available that will mount on the wheel pictured below where the sensor receiver would be mounted on the flat plywood? Thank you!
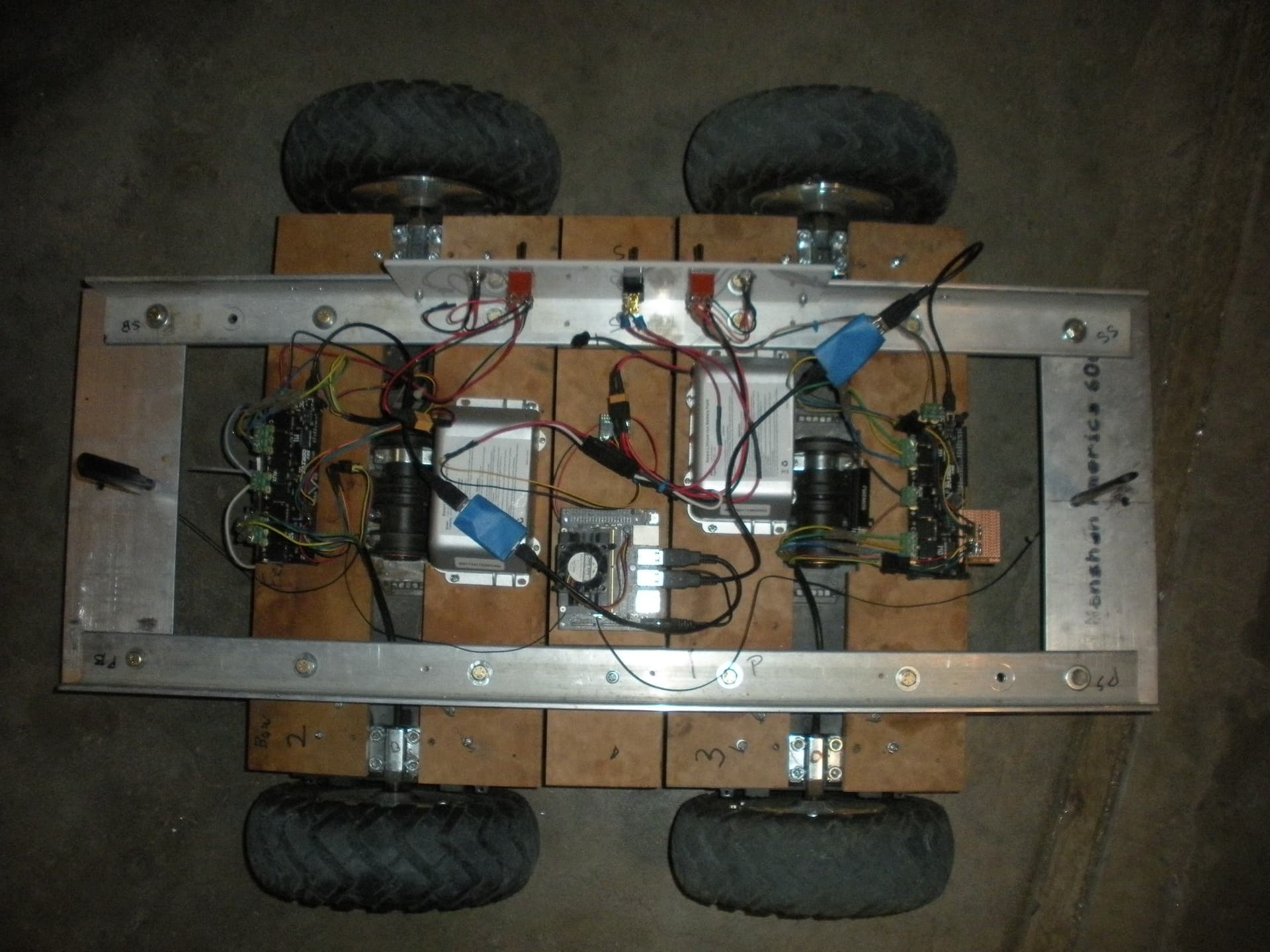
The hoverboard was flipped over on it’s mud guards and gutted out. I use wood a lot in my projects, plywood and oak. The hoverboard chassis is flat aluminum extrusion with many 4 mm screw threads.
I had to saw off eight protrusions on the chassis. A little bit of measuring and drilling got me to this point and that allowed the 1/2" plywood to lay flat using some longer 4mm screws. I have since added two pieces of 2" aluminum angle 33" long and dolly wheels. Later I’ll mount my Deck Donkey electronics and hopefully run it through its paces. This is just design phase, I will do some strength test to check for weak points.
BTW I assume this is a self-balancer? Where will the controller (which takes data from an IMU and updates the torque/velocity/position command to keep the machine upright) live? Will you make a custom firmware which talks to an IMU over SPI? Or will you do the balancing externally?
Or, will you simply use additional wheels?
Want to see if my field donkey will carry a load. Loaded two 60 lb (120 lbs.) bags of concrete mix on the payload platform you see in the picture above. On a level surface I had no problem. Going down hill did not have a problem even stopped and stood it’s ground.
Now coming up the hill it started out fine but when I hit a bump in the road it seem to get a bit sluggish and at a certain point it seemed to quit and go into idle mode and I nearly lost it over an embankment.
I believe I may have gone over a current limit and caused an error. Is there a setting that when an error does occur it would go to close loop mode with zero velocity. These hoverboard motors are rated at 300 watt apiece and I believe 4 motors should handle 120 lbs up 20% grade. Should I be looking at all my current settings or just certain ones.
Thanks for any pointers!
I put 2x6 supports under my ramp which had a pitch of 38%. The donkey with payload (would climb until I stopped the forward velocity it then failed to hold position and free wheeled down the ramp. It would not move until I went to IDLE and then Engaged (CLOSED LOOP)
I will do my payload testing on this ramp for a while at least!
I have learned that the payload has to be balanced. If center of gravity is on the rear wheels the front end will lift and slide left or right