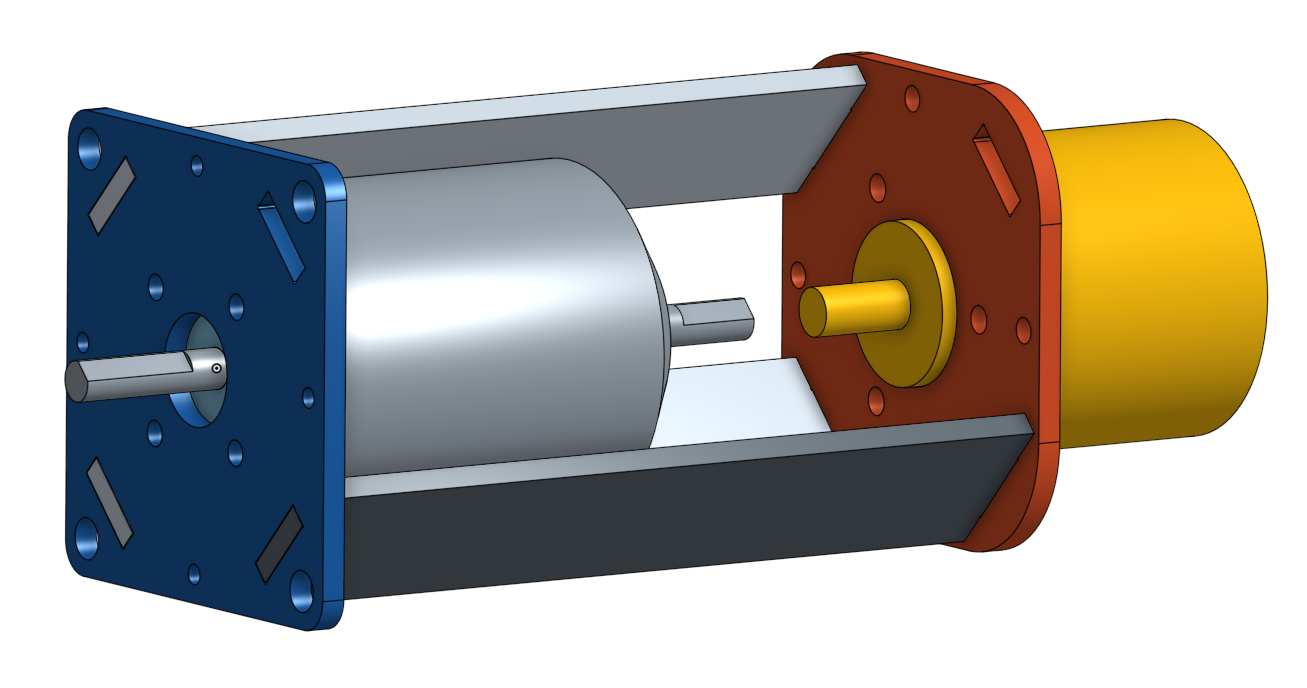
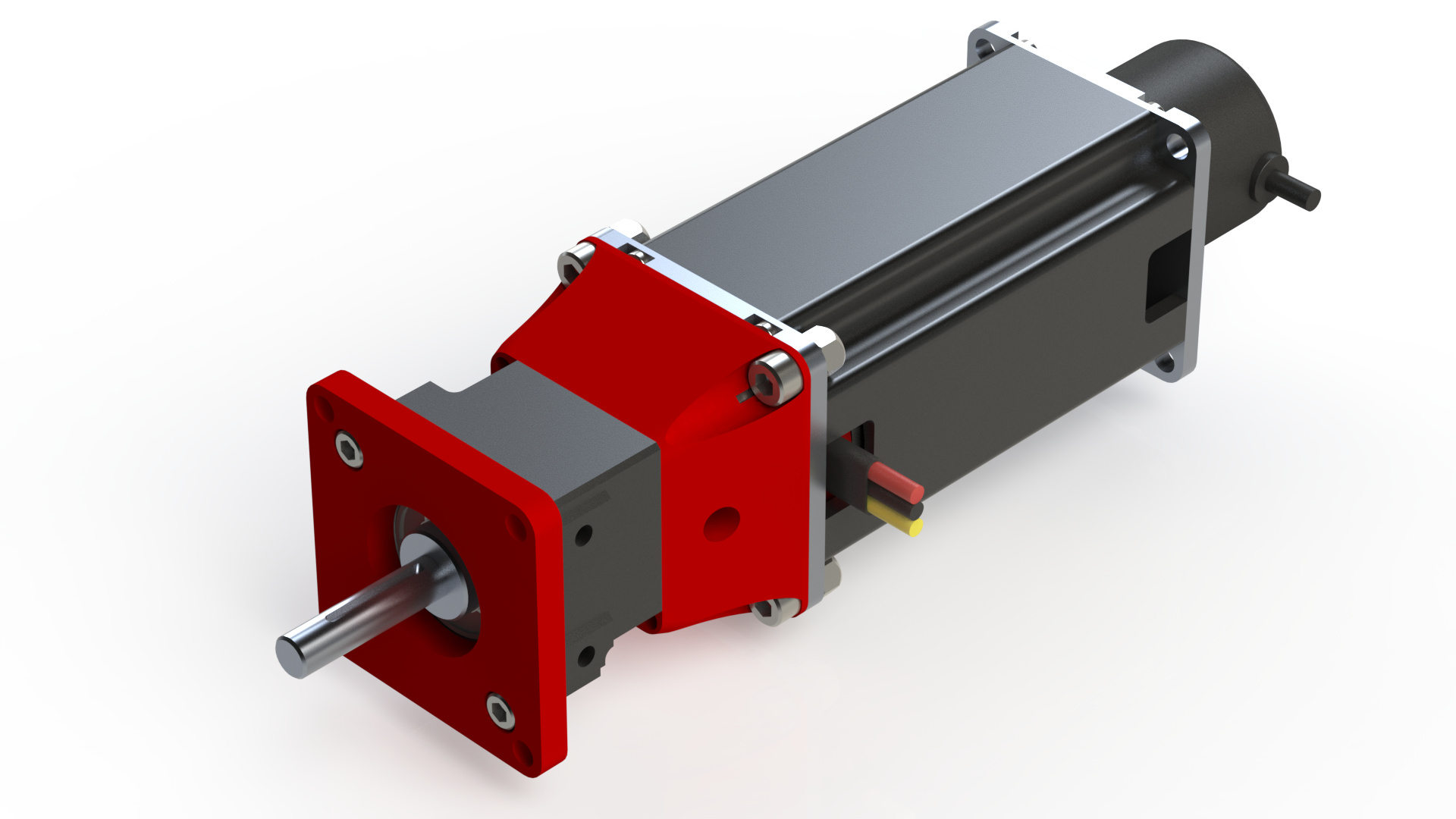
Hey y’all, I wanted to show you what I’ve been working on. As you can see in the picture, I’ve been designing a NEMA 23 case for the N5065 motors that I’ve been working with. While I was working on that, I also found an inexpensive 10:1 planetary gearbox with an 8mm output shaft. Video below.
Yeah, I can link the gearbox. The motor shell isn’t ready yet.
I just wanted to hold off a bit on the gearbox because I wanted to write instructions for it and not answer individual questions for each person But it’s the VEX Robotics VersaPlanetary Gearbox. The specific one I have is:
VersaPlanetary v2 Base Kit, 1:1, CIM Output - this is the 8mm output shaft version w/ 2mm key
10:1 gear reduction (select from the dropdown)
That’s all you need to select to get what I have. The 3D printed parts will be compatible with all variants though because of how the gearbox shell is actually designed.
I haven’t tried the integrated encoder option, but if anyone has a bit of extra money and wants to try it, it’s a 1024 PPR quadrature encoder with an additional PWM absolute signal. It would simplify the whole setup (wouldn’t need the rear encoder), which is nice.
Take a look at the Docs & Downloads tab at the bottom of the VersaPlanetary page too - they have a user’s guide, torque ratings, axial force ratings, etc for each output shaft type. Make sure you read the assembly instructions and grease appropriately with White Lithium Grease, which is their recommended grease.
The holes that the 3D printed motor adapter uses are #8-32. But the holes on the front of the gearbox (where the NEMA 23 plate attaches) are #10-32. Caught me off guard, so heads up!
Looks great! I am also keen to know how hot it gets in there. Any idea on the backlash of your setup with the 10:1 reduction? Even just an estimate of how many degrees you can spin the motor with a fixed output would be good to know.
I haven’t tested the temperature yet. I was just thinking about that last night, actually. I have an IR temp gun here I can use and let y’all know soon.
The backlash is low. The next step is for me to figure out how to mount my 2nd encoder to the output shaft so I can map motor position vs output position and determine precision, accuracy, and backlash. Might do that tonight if I can figure out a good way to do it.
Even just an estimate of how many degrees you can spin the motor with a fixed output would be good to know.
I may just have to use the encoders for this. I can’t back-turn the motor by hand, it’s too torque-y, and I’m not sure how I would lock the output shaft. Cogging is also an issue with this motor. When I had the gearbox apart and playing with the input coupler, it seemed like very little. Hard to tell with just fingers though.
If you are having trouble determining the backlash by hand then that is already a pretty good sign to me.
I wonder how the quality of these gearboxes compares to some of the cheaper ones on aliexpress like this 10:1 and this 36:1. Both are just over $50 USD.
This looks amazing! I’ve been working on a Nema23 assembly myself, but one with a gearbox is clearly very intriguing. Are you going to measure in your box with a dial indicator any time soon?
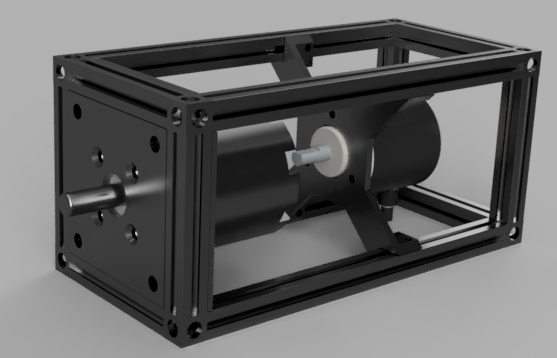
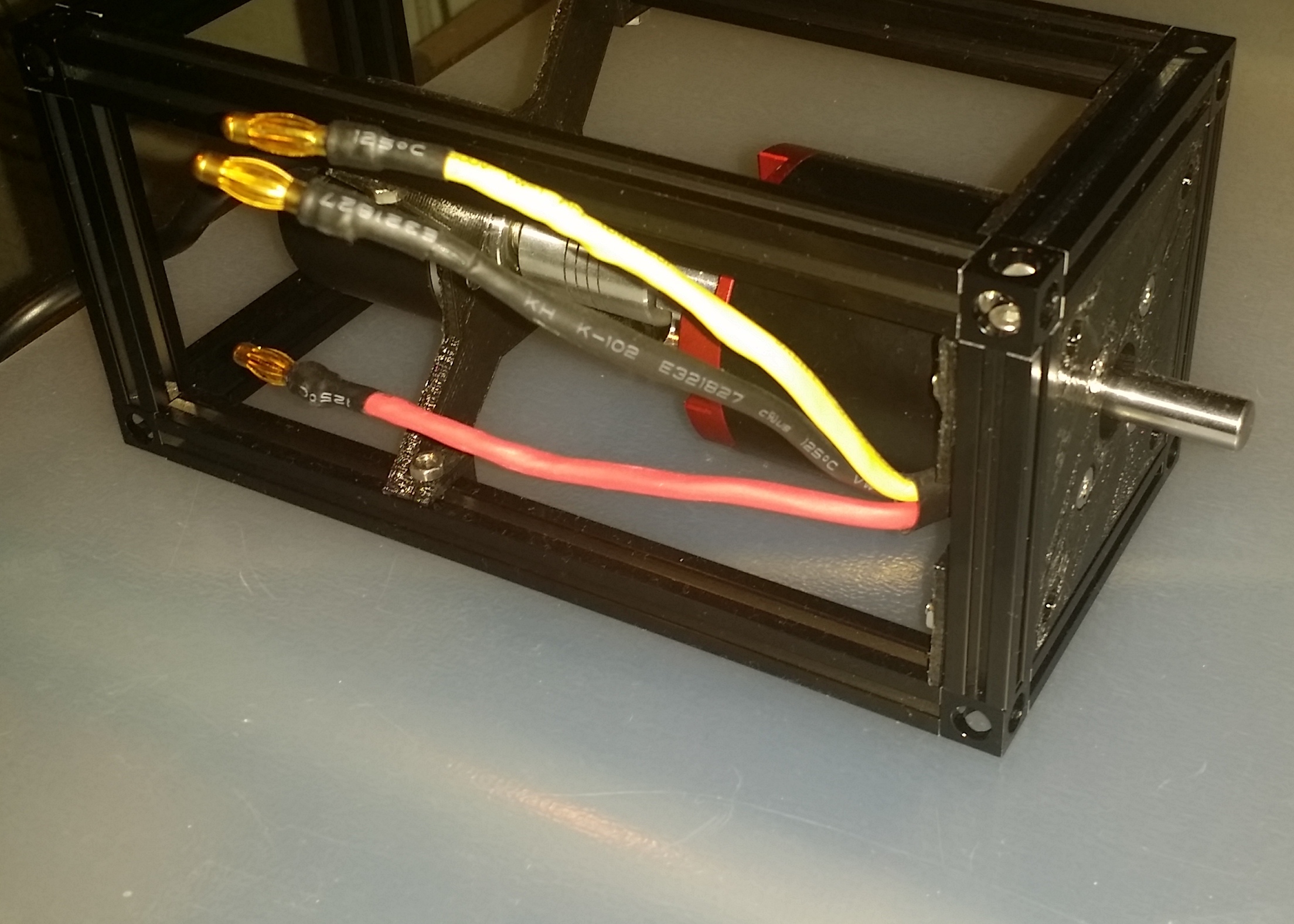
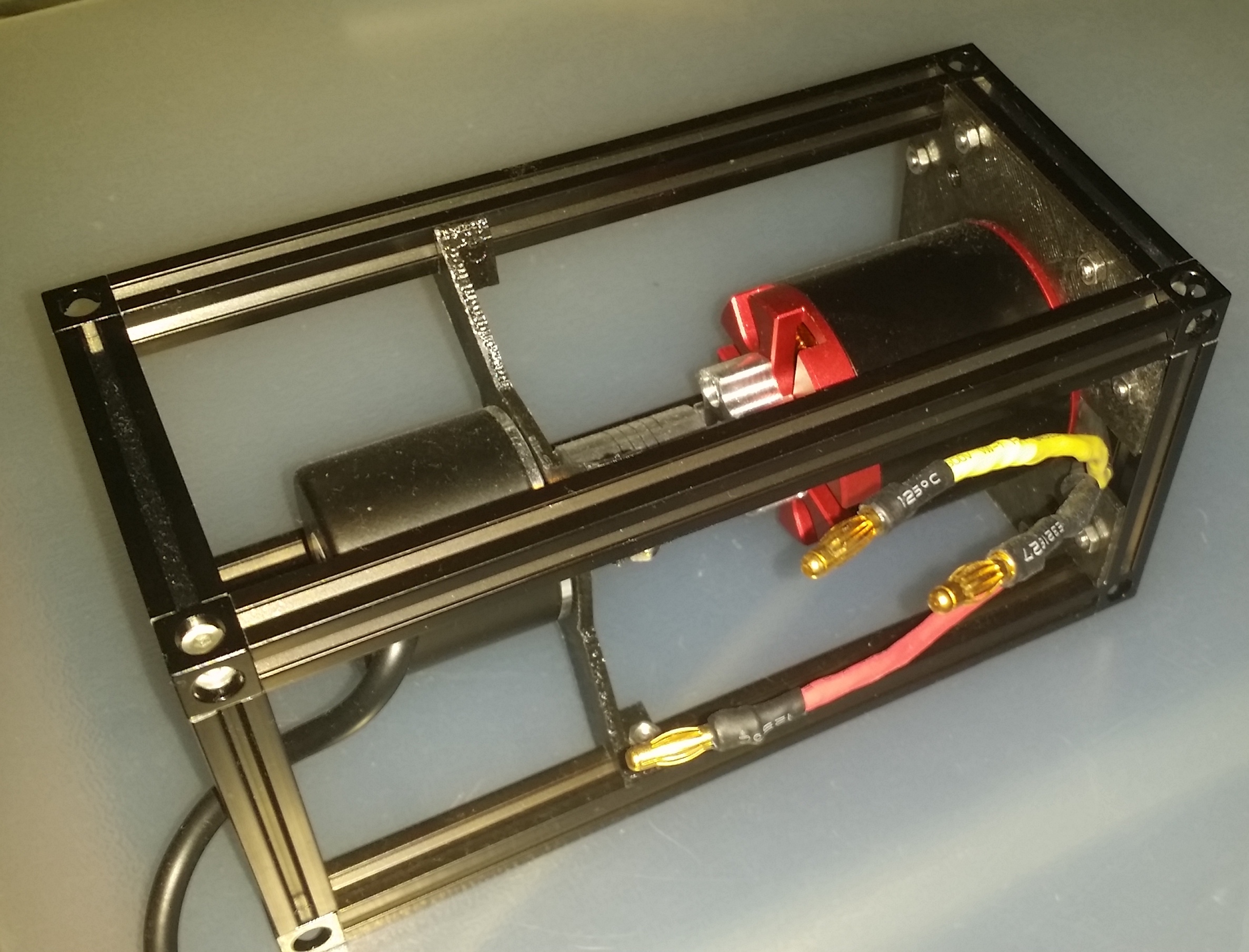
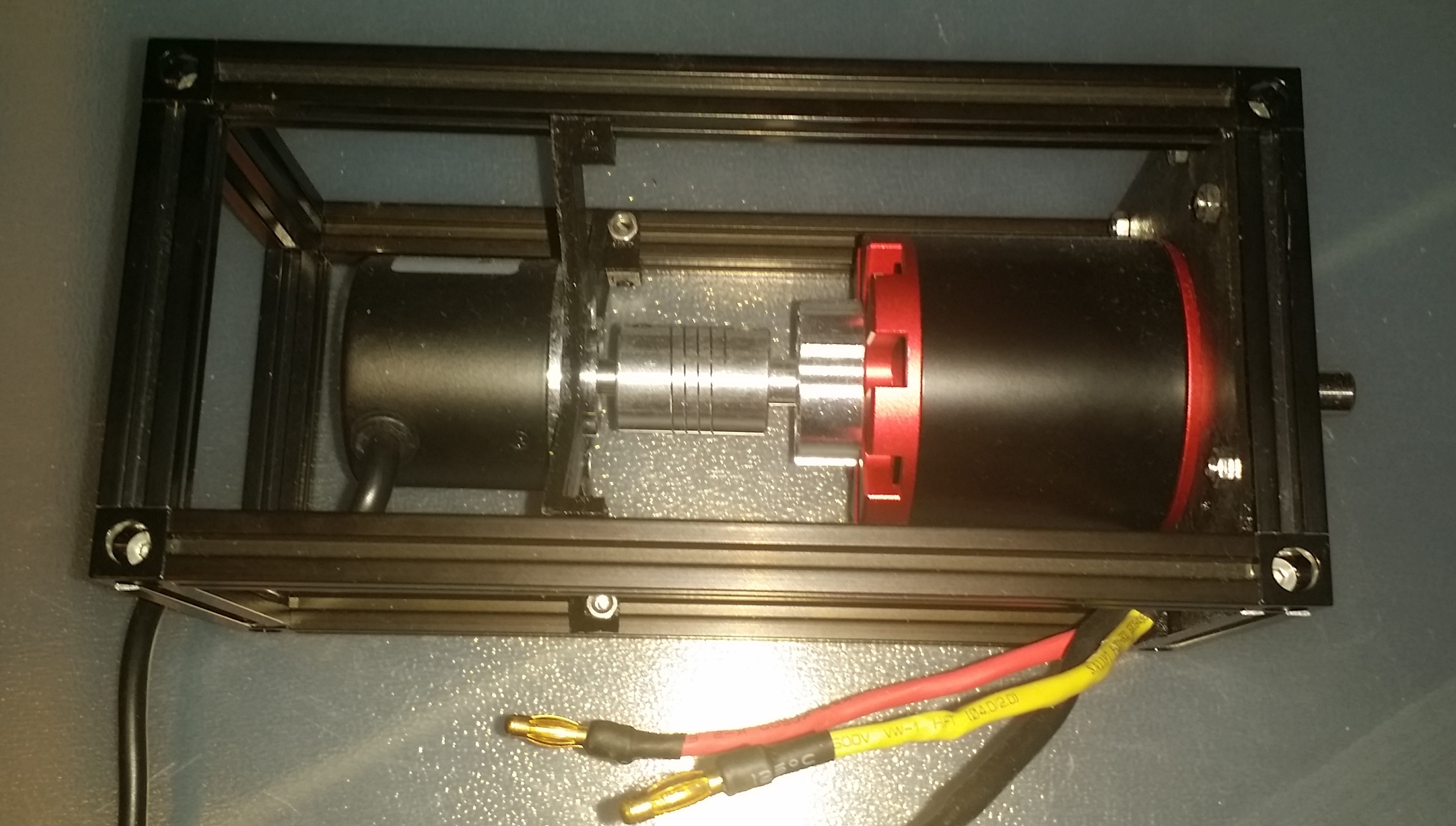
I’m just going to take the freedom in posting my approach, I hope you don’t mind. As they are conceptually related, it makes sense to me to collect them in one thread.
Essentially my idea was to build a small frame around the assembly with makerbeams, and hold the parts in place by 3d printed parts. I still have to fit the XLR plugs.
Not sure what you mean. Are you asking if there’s runout at the output shaft? I have a dial indicator here somewhere, but it’ll have to wait until i fix this 3D printed shell. I didn’t make the adapter QUITE long enough, so the motor shaft bottoms out before the adapter and causes issues.
I thought I’d share this concept for making an encoder holder. The idea is to use laser cut steel sheet and threaded rods to hold it together, to make a NEMA23 compatible servomotor.
Sorry to resurrect an old thread. How did this all turn out? Did those planetary gearboxes wind up working well? I’m building a flight stick for a flight sim using the 5065 motor with a pulley, but I’m thinking a planetary gearbox might be nice for beefing up the torque a bit. Did those Vex gearboxes prove to be reliable and low backlash?


 But it’s the
But it’s the