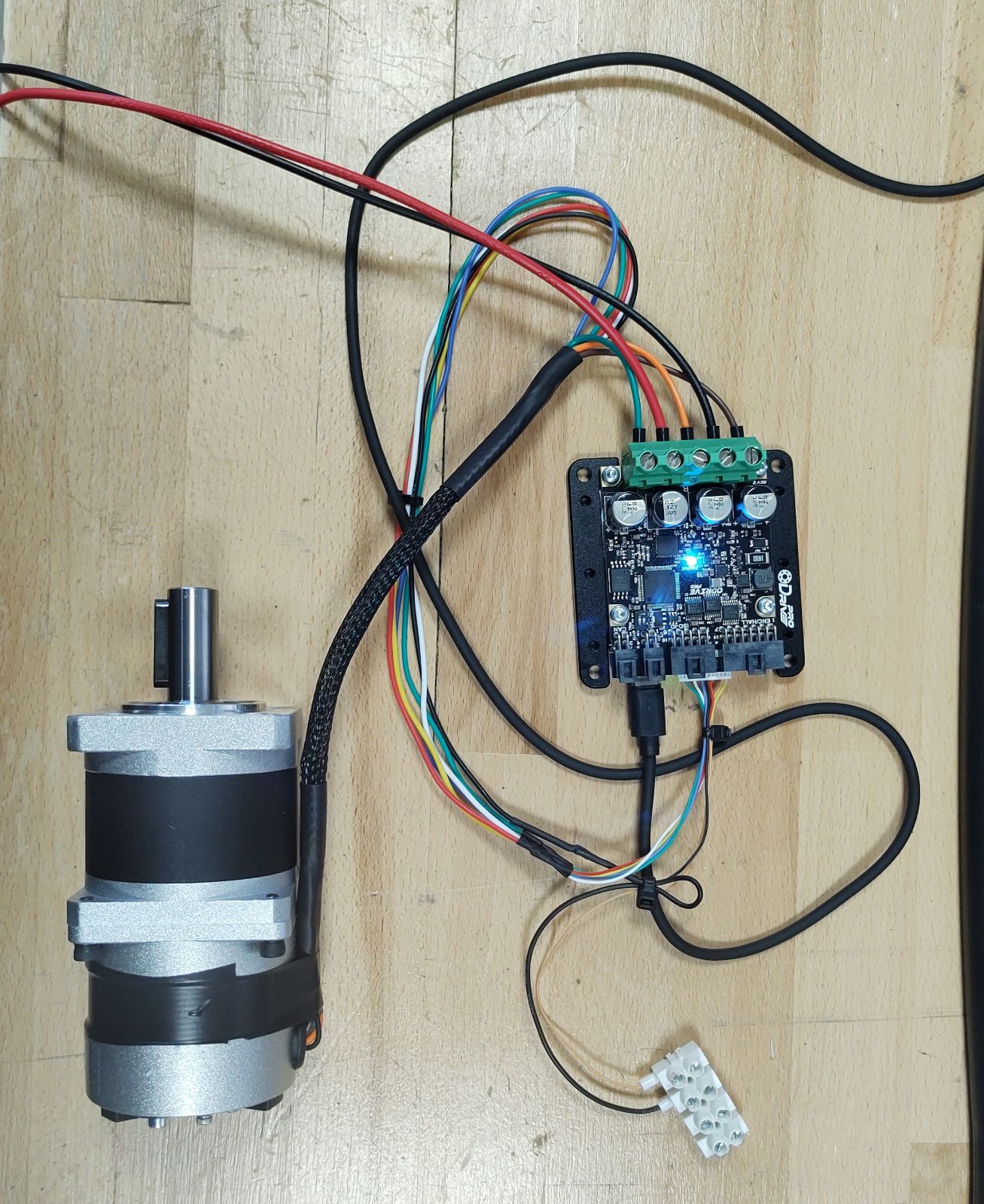
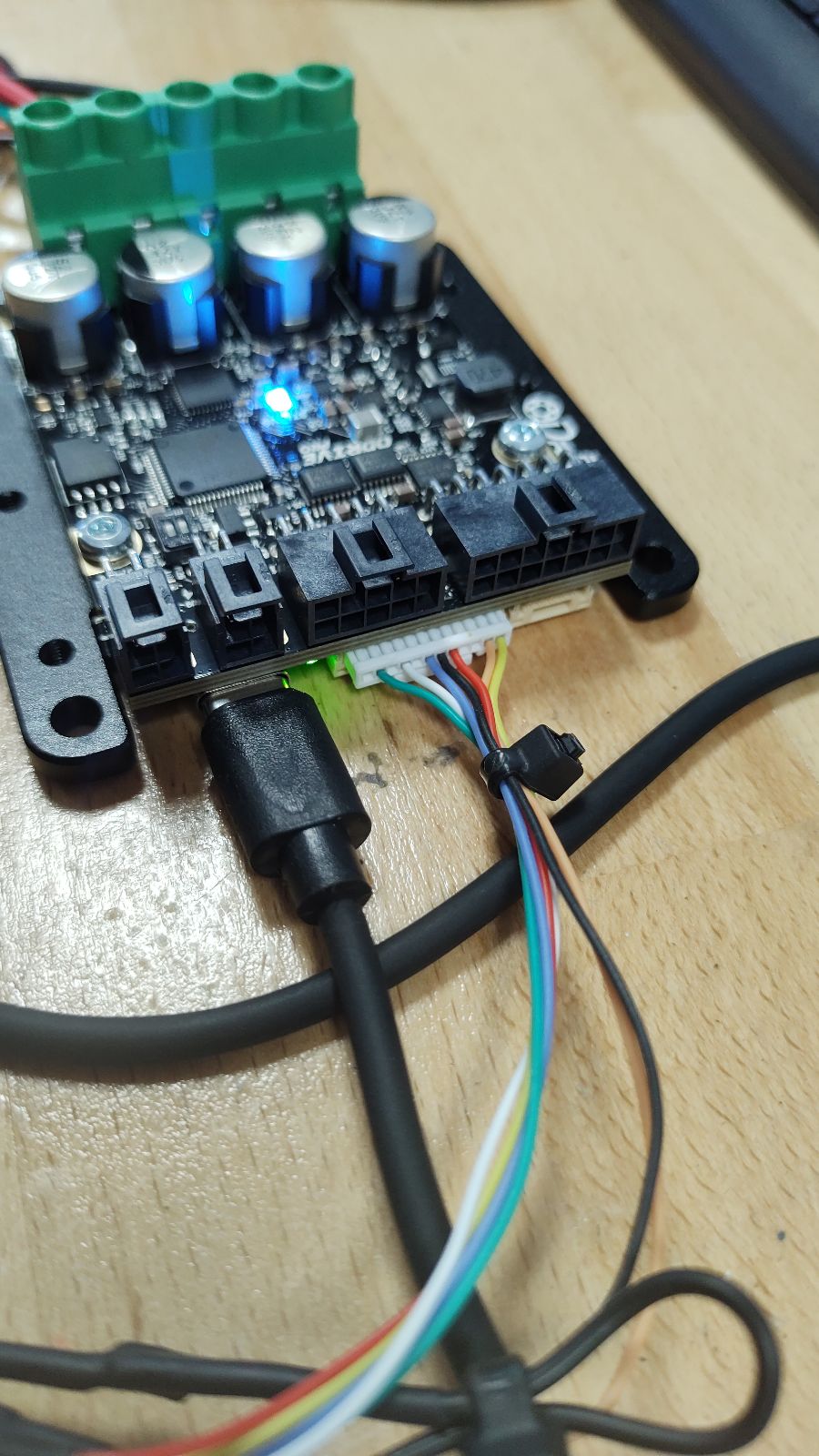
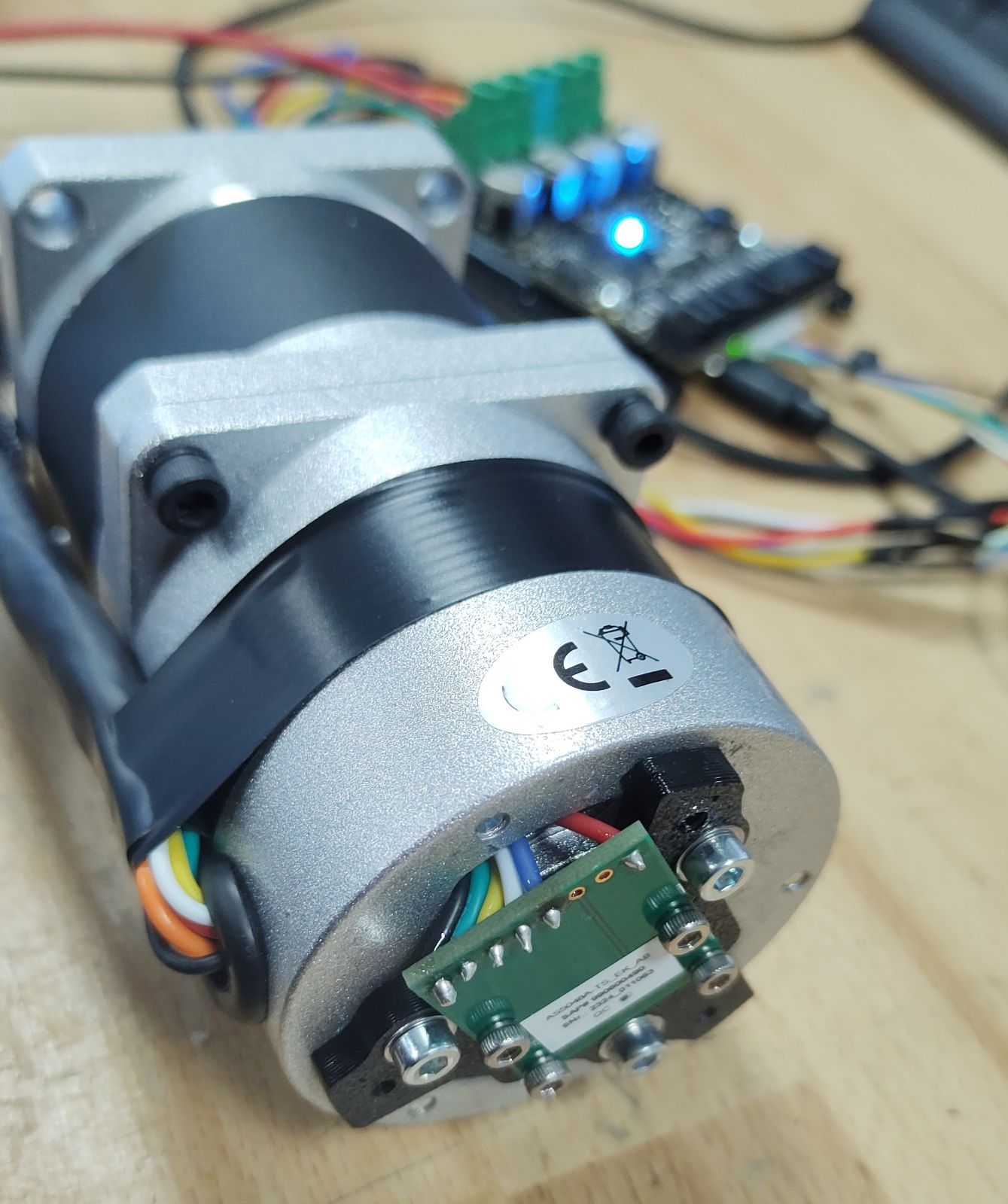
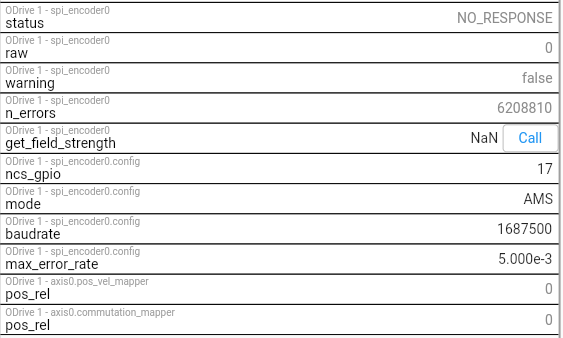
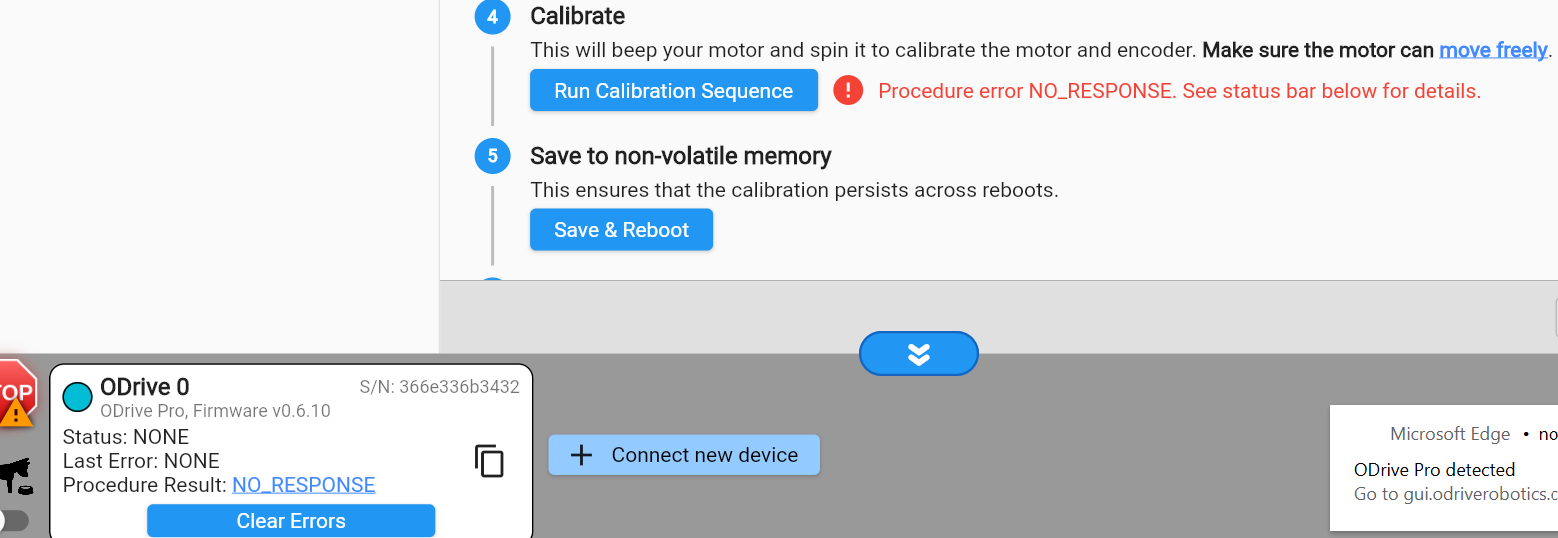
Hi, I’m trying to make work the AMS AS5048A encoder with the ODrive Pro and motor (link). When I run the calibration sequence, the motor moves a bit and then stop, giving the NO_RESPONSE error. I share my configuration and some photos of the connections:
When I run the calibration sequence, pos_rel stays in zero. I tried reading with a multimeter the voltage on the PWM output of the AS5048A and I get readings when i move the motor’s rotor, so I guess the magnet is properly mounted and aligned. n_errors continues to increase rapidly.
What could be the problem and how can I solve it? Thanks in advance!
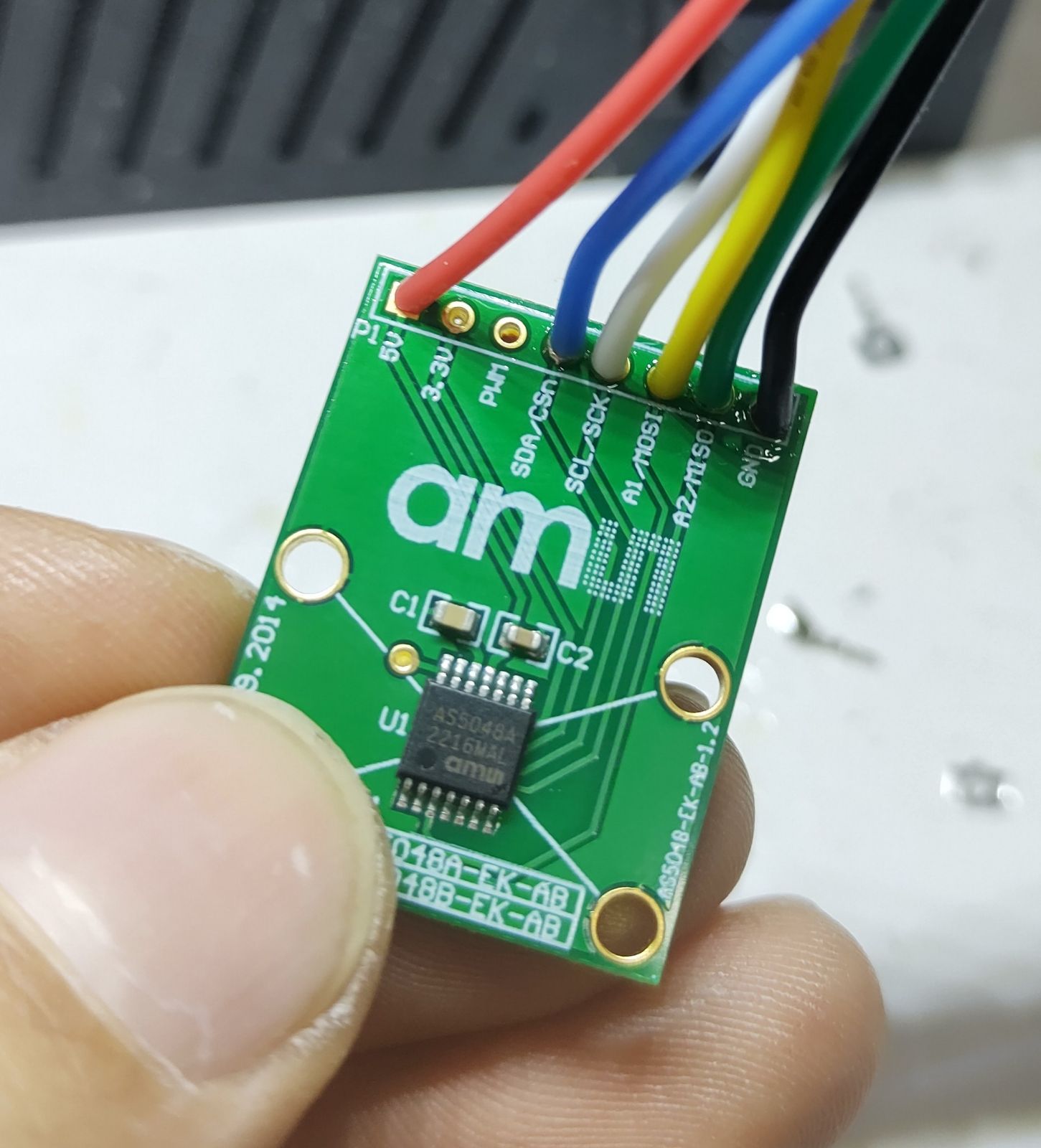
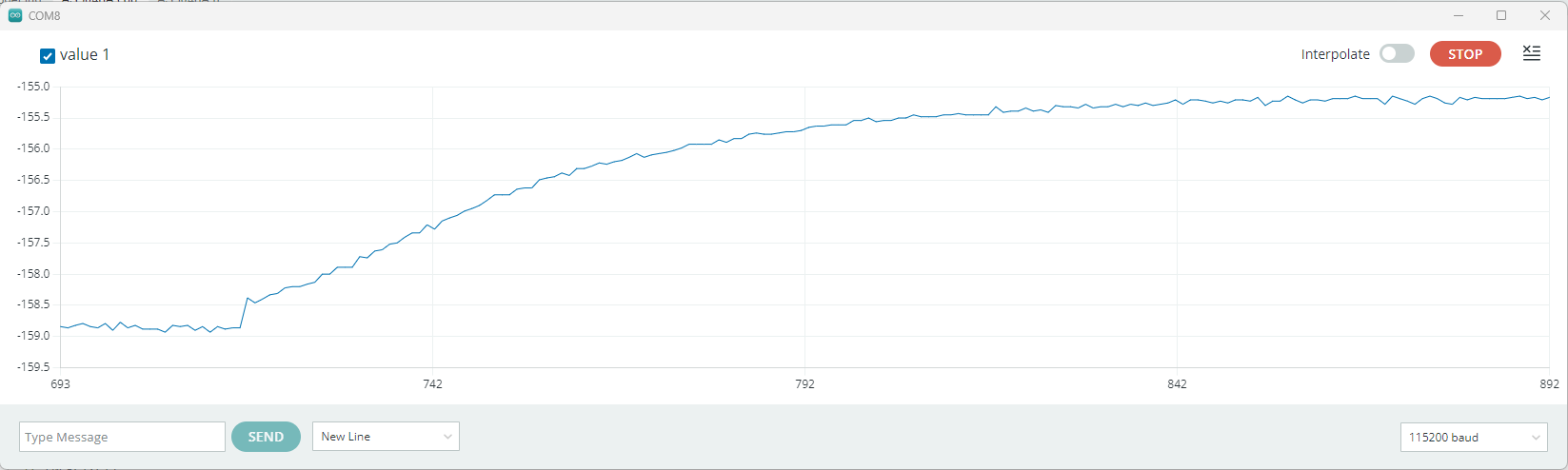
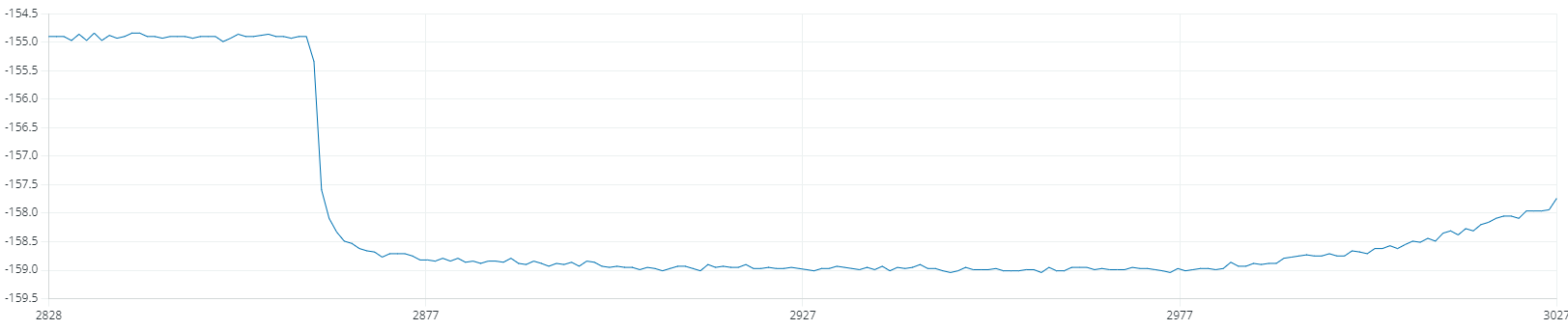
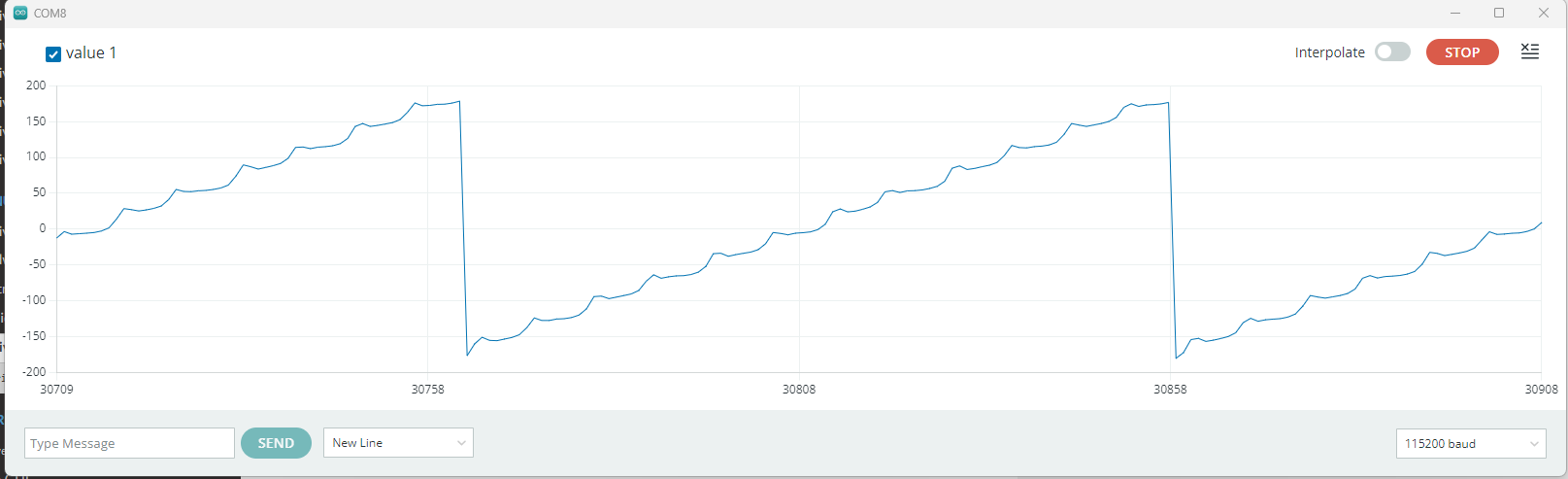
As additional information, when i connect the encoder to an Arduino Mega via SPI it can read the angle without problems (with this exact setup), so this confirms there’s no problem with the encoder-magnet setup. Here’s the reading of the angle in Arduino while the ODrive tries to do the calibration (vertical axis is degrees):
Thank you as always for the really useful and comprehensive overview and information!!! Can’t express how much of a breath of fresh air it is.
Wiring looks great, no concerns there.
Can you try setting GPIO17 mode to DIGITAL? odrv0.config.gpio17_mode = GpioMode.DIGITAL (or equiv setting in GUI), then save_configuration()
If you’re also able to hook up an oscilloscope or logic analyzer to CLK/MISO/MOSI/CSn that would be quite helpful.
It’s been a while since I played with an AS5048, I have one somewhere and I’ll try replicating your setup.
General recommendation though – if you can swap this with an OA1, you’ll have a much nicer experience overall the SPI can end up being a big issue when you’re actually running the motor, as it’s so sensitive to electromagnetic interferance.
Hi, thanks for the response. I tried setting the gpio17 to DIGITAL but no luck there. I don’t have an oscilloscope with me right now. We ordered a couple of OA1 for the future, but I would like to make this one work for now.
Hi! Apologies for the delay in my response, had an unexpectedly slammed week, and didn’t get the chance to get to this as much as I would’ve liked to. I’m unfortunately out of town now, will be back in about a week and a half and can prioritize giving this a shot then.
In the mean time, would you be open to taking an oscilloscope capture of the CSn/SCK/MOSI/MISO pins?
I’m facing the same issue, I’m using two AS5047D encoders for two separate motors and odrive pro’s, one of the encoder works properly but the second one displays the NO RESPONSE error during calibration. The connections and mounting for both is the same. I tried setting the GPIO17 mode to digital but it didn’t work.
I also tried using a different AS5047D but I’m getting the same issue. I’m not sure what to do. Any ideas would really be helpful.
Thank you!
Could be magnet mounting – if the AS5047D is throwing an error flag. If you have an oscilloscope or logic analyzer, I’d definitely hook it up to each and see the difference. You say mounting and wiring is the “same” – are we talking 3D printed parts the same, or machined metal the same? Feel free to just dump a bunch of pics of everything - encoder mounting, magnet mounting, wiring, the more the better - and I can take a look through.
Hi, so sorry for the delayed reply. Yes I mean the 3d printed parts are the same. I’m not sure what the problem was but I tried using a different encoder and it worked!
I’ll add the pictures of the mounting. Thank you so much!