This GUI is outdated and no longer supported. Please check out our new web browser GUI
We received good feedback from you about the first testing version of the ODrive GUI here.
Now, a newer version is available! In addition, the GUI has been moved to the ODrive git repo on the devel branch.
You can find the beta testing releases here for Windows, Linux, Mac, and Raspberry Pi
And a short demo video here.
Please use this thread to report on what you like, what you don’t like, what’s broken, and what you would like to see!
Dependencies
The GUI requires python 3 to run. In addition, you must install the following python modules: flask, odrive, flask-socketio, flask-cors
On windows, you can do that by running this command: pip install odrive flask flask-socketio flask-cors
On linux, use pip3 install odrive flask flask-socketio flask-cors
Python must be available on your system path for the GUI to find it. During installation of python, via anaconda or “vanilla” python, it will ask you if you wish to add it to PATH - choose “yes”.
Beta 3 Changes
Correct handling of infinity as a value
ODrive config import/export
Menu added to header
Version bump of socket.io dependencies
ODrive enums are now autogenerated and included on build
Slider component fixes
Numeric values automatically switch between decimal formatting and scientific notation
Beta 2 Changes
Numerous improvements to the handling of disconnecting and reconnecting ODrives. This functionality is now much more stable.
Input modes now have the proper enums, courtesy of mdhom on github! (first PR to the GUI!)
Beta 1 features:
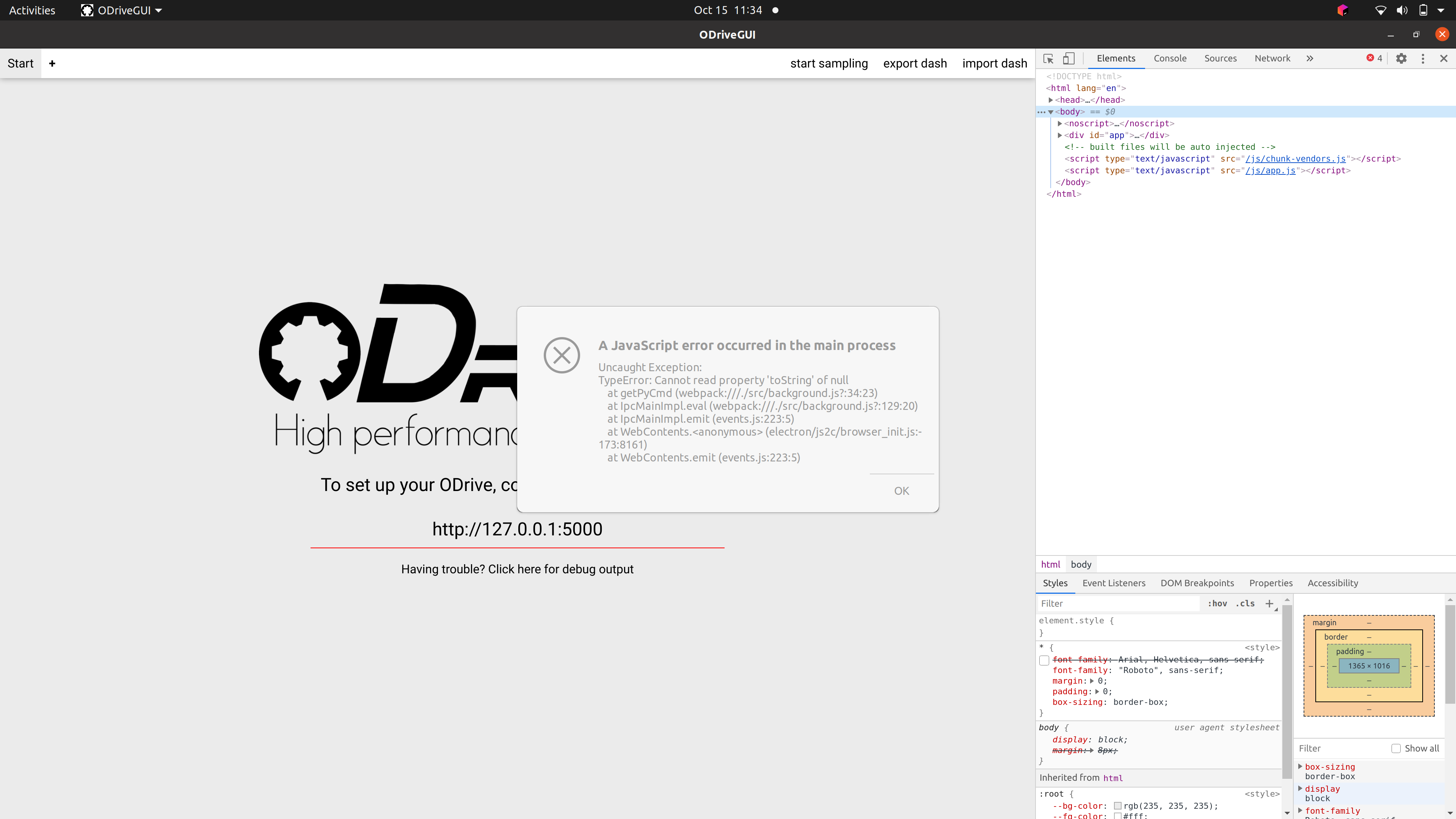
Output from the server is available on the Start page for debugging
Parameters like axis.requested_state that have enums (AXIS_STATE_IDLE, etc) now show those enums in the GUI
Numeric control inputs support arithmetic input
Axis errors are available, similar to dump_errors() in odrivetool
A Configuration Wizard has been added
The Parameter Tree popup is now filtered depending on what it is being used for
Disconnect/reconnect of ODrives is supported
Connecting to multiple ODrives is supported
Application now has an icon
Building from source
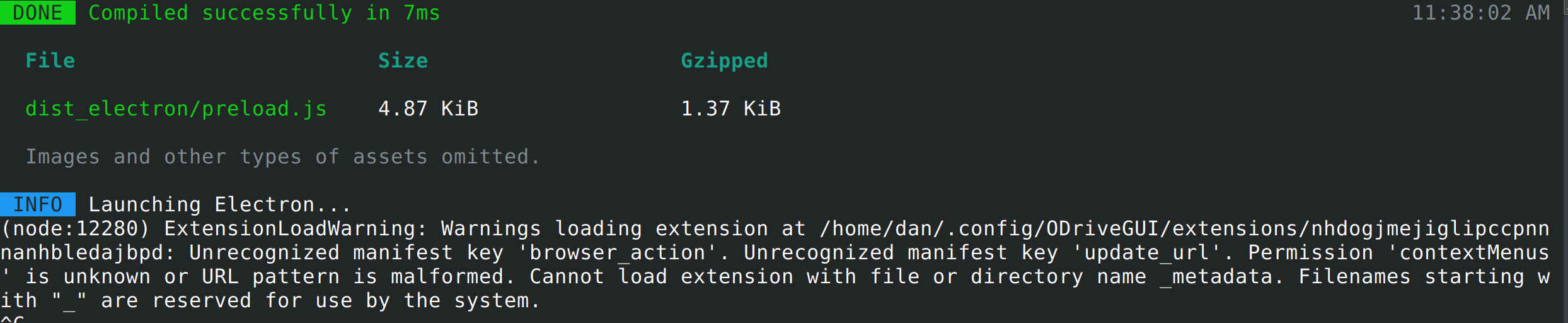
To build the GUI, you must install nodejs. After that, clone the devel branch of the ODrive github repo. Open the GUI directory in the folder where you cloned the repo, and run npm install and then npm run electron:serve to run the GUI. If it works, you can use npm run electron:build to build an executable for your platform. The executable file is available in ODrive/GUI/dist_electron.
Running from source
On the devel git branch, there may be unreleased changes to dependencies like fibre or the ODrive enumerations. Use this command to launch the GUI with the dependencies from the repo:
npm run electron:serve -- ../tools/