Hello. My team and I have been working on a Self-Driving Car for the past few weeks, but we have encountered a problem that has put us back to square one. (We are the 3rd generation of this project; Gen 1 and Gen 2 were able to make the move, but due to some complications, most electronics broke down, and the software was corrupted)
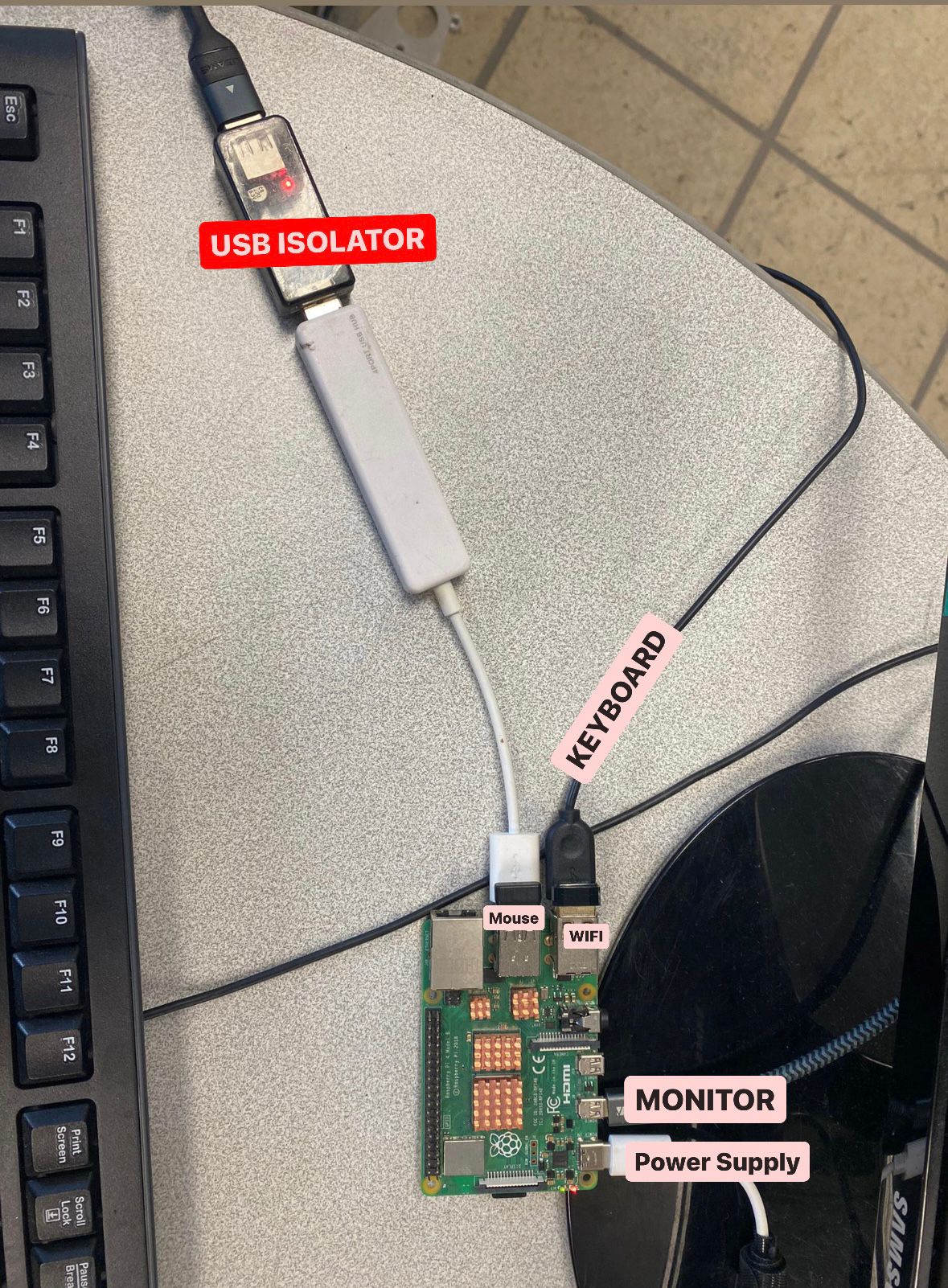
We use a Raspberry PI, an ODrive Pro, an AMT103-V Encoder, an MITSUBA M2096D-Ⅲ Brushless DC Motor, and a UNICELL 12.8V DC Car Battery.
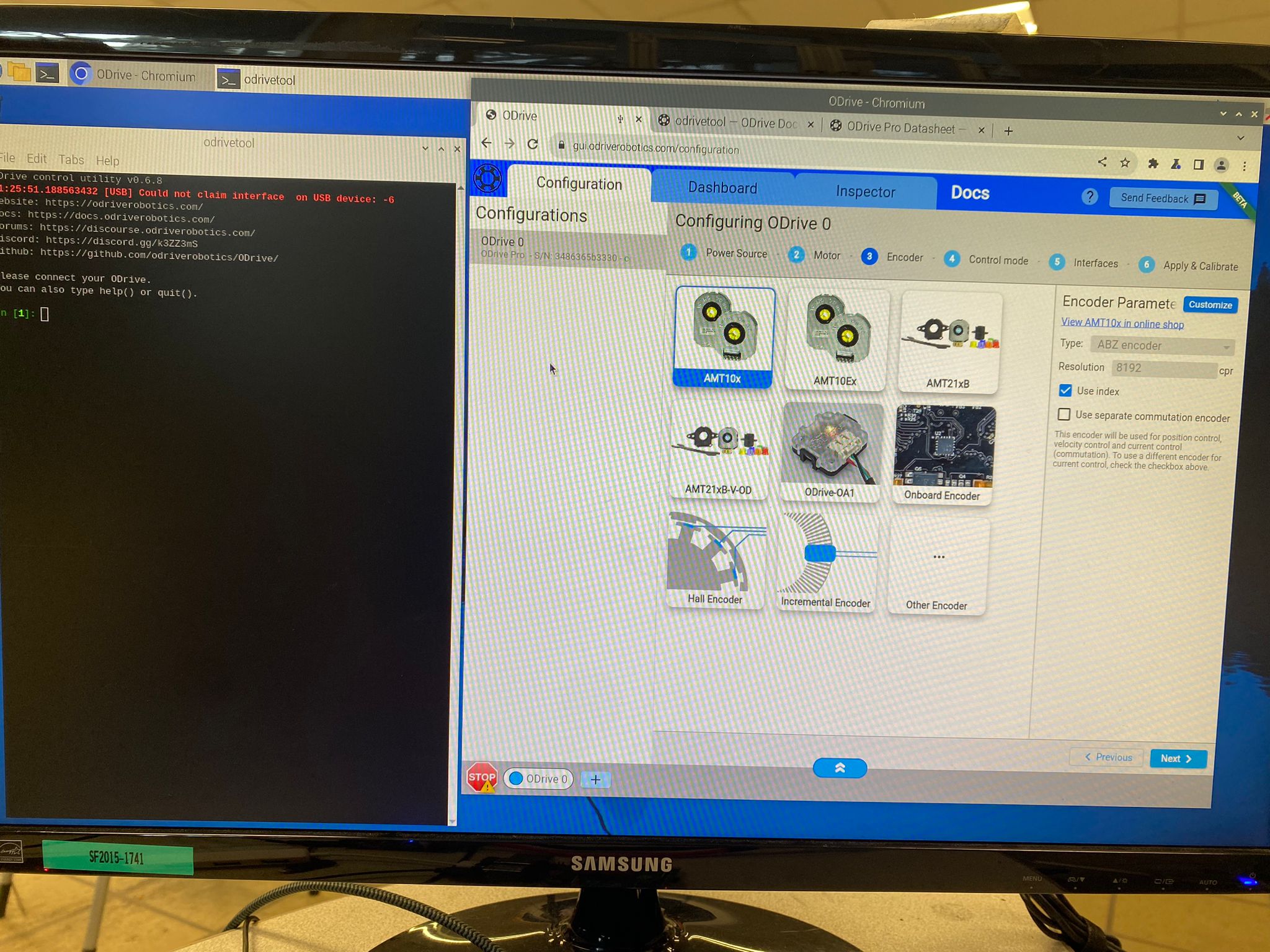
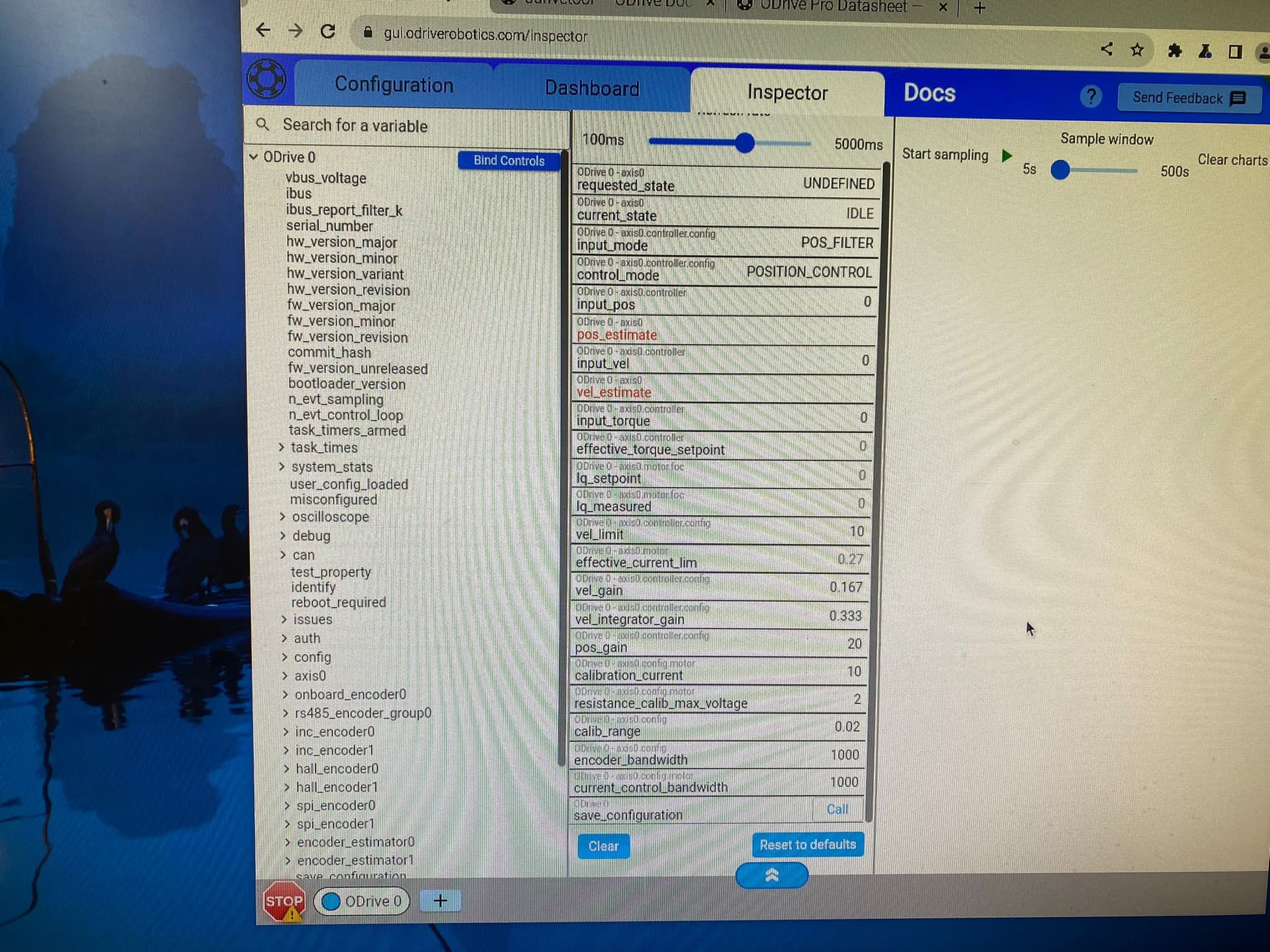
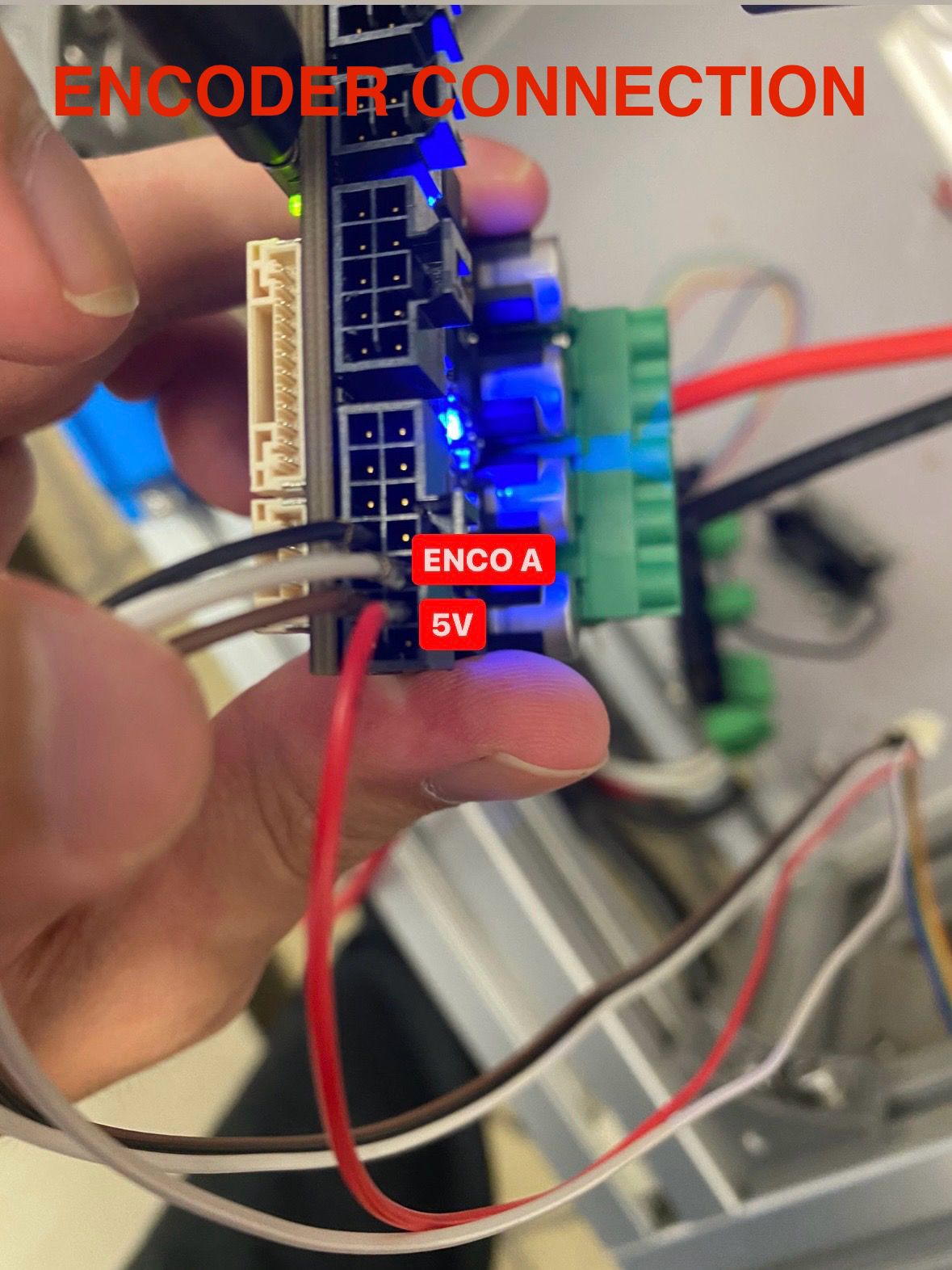
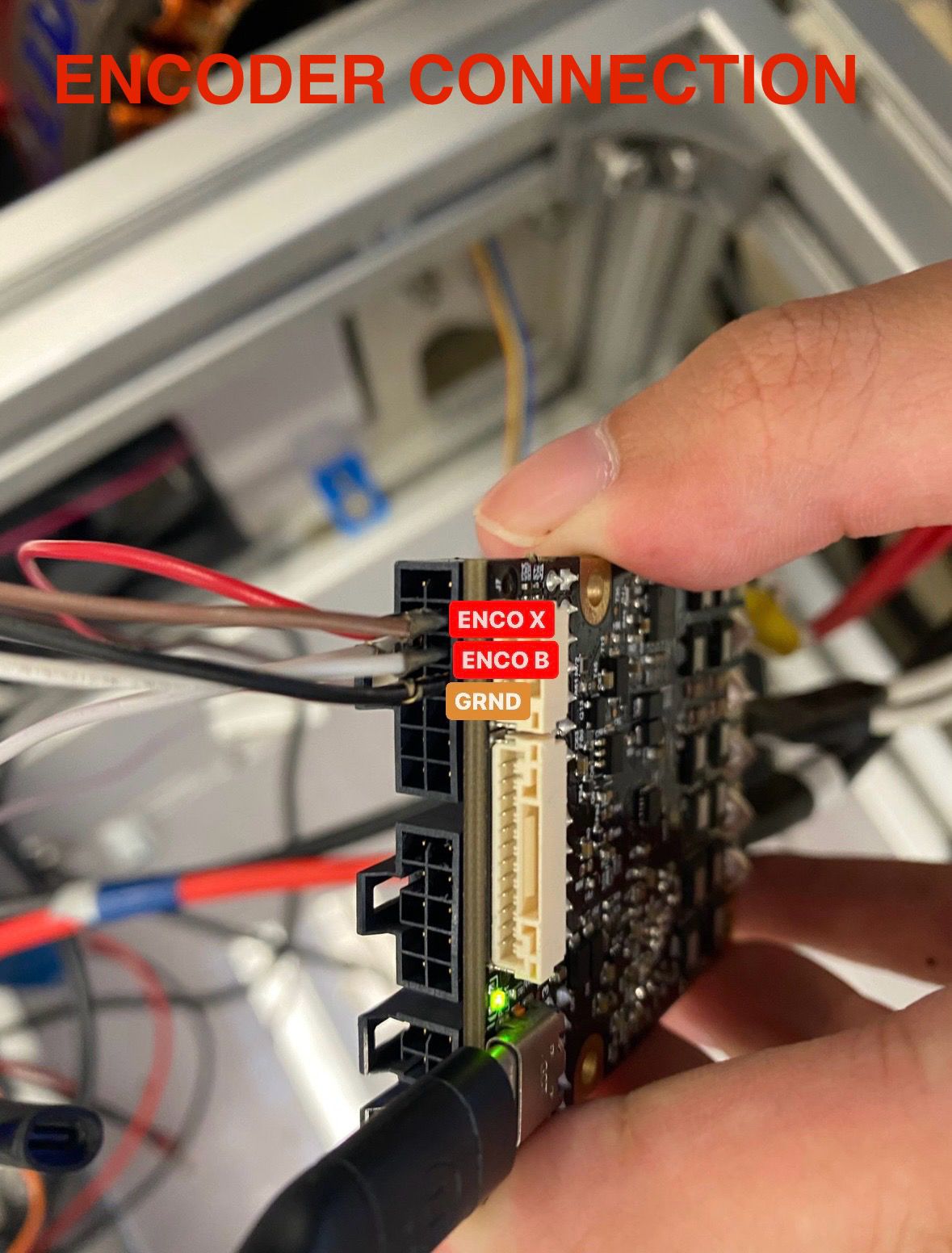
We have tested the AMT103-V Encoder separately using the ODrive Pro and Arduino UNO. Connecting the Encoder to the FEEDBACK IO pins 2 (+5V), 3 (ENC0 A), 9 (ENC0 Z), 10 (ENC0 B), and 11 (GND) and Arduino UNO pins +5V, GND, 8, and 9 to ISOLATED IO pins 1 (ISO VDD, +5V), 2 (ISO GND), 7 (UART RX, G12), and 6 (UART TX, G13). [ODrive PRO UART RX to Arduino UNO pin 8 and ODrive UART TX to Arduino UNO pin 9] We are using the code from [AMT10 Encoder setup | Details | Hackaday.io] (AMT10 Encoder setup | Details | Hackaday.io). It can read the encoder output position; however, the ODrive GUI [ODrive (odriverobotics.com)] (ODrive) cannot track its position and velocity.
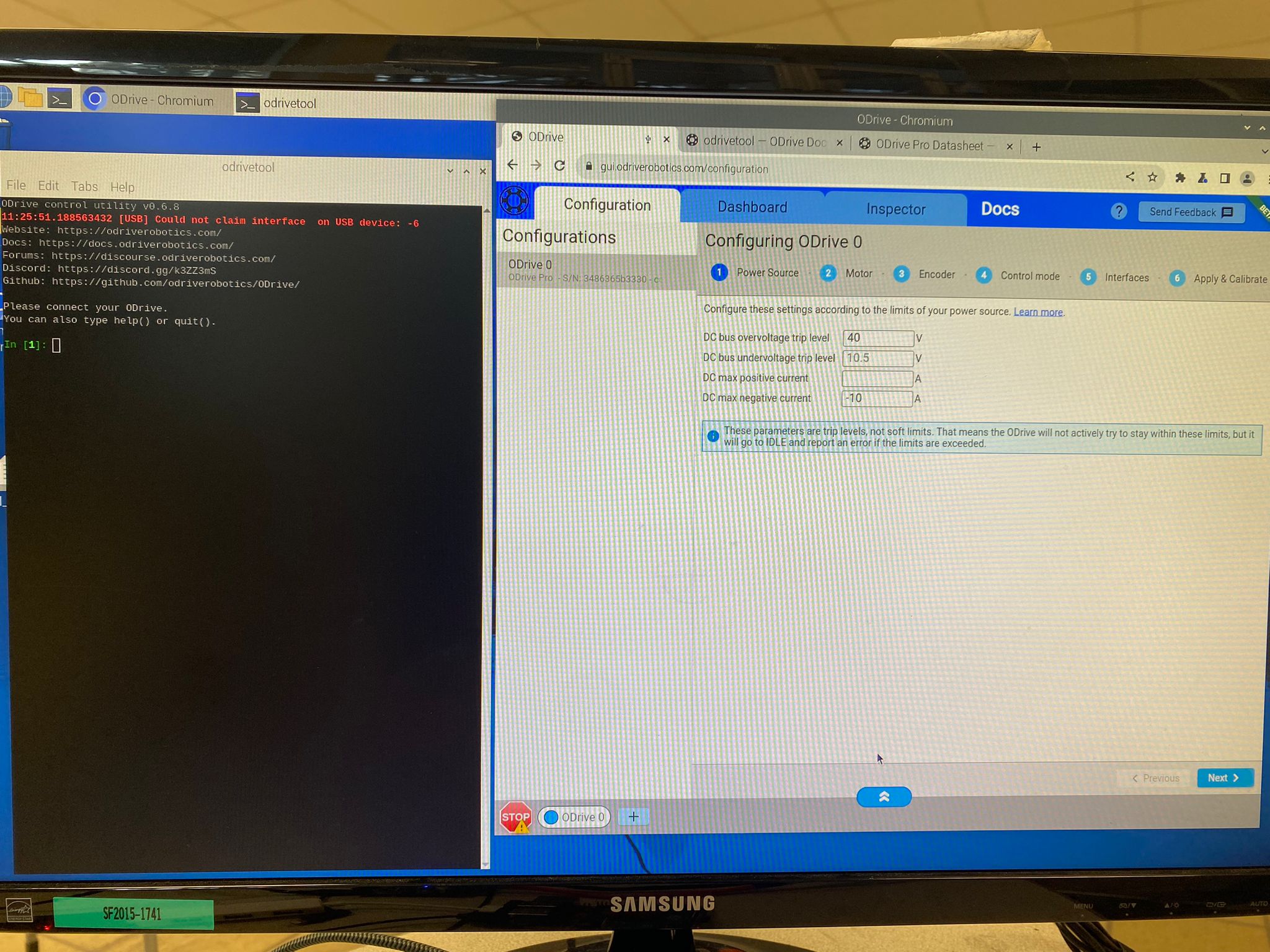
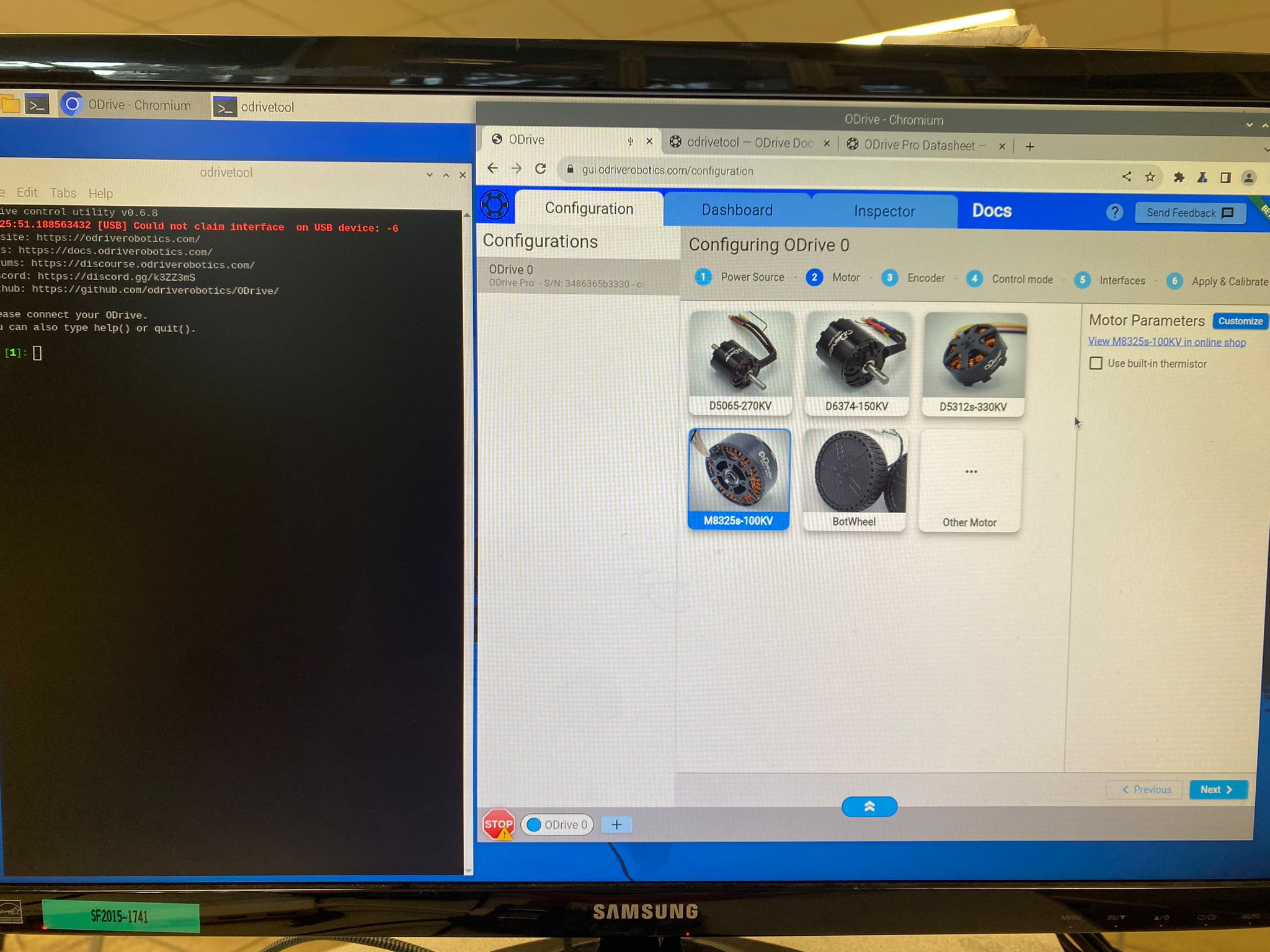
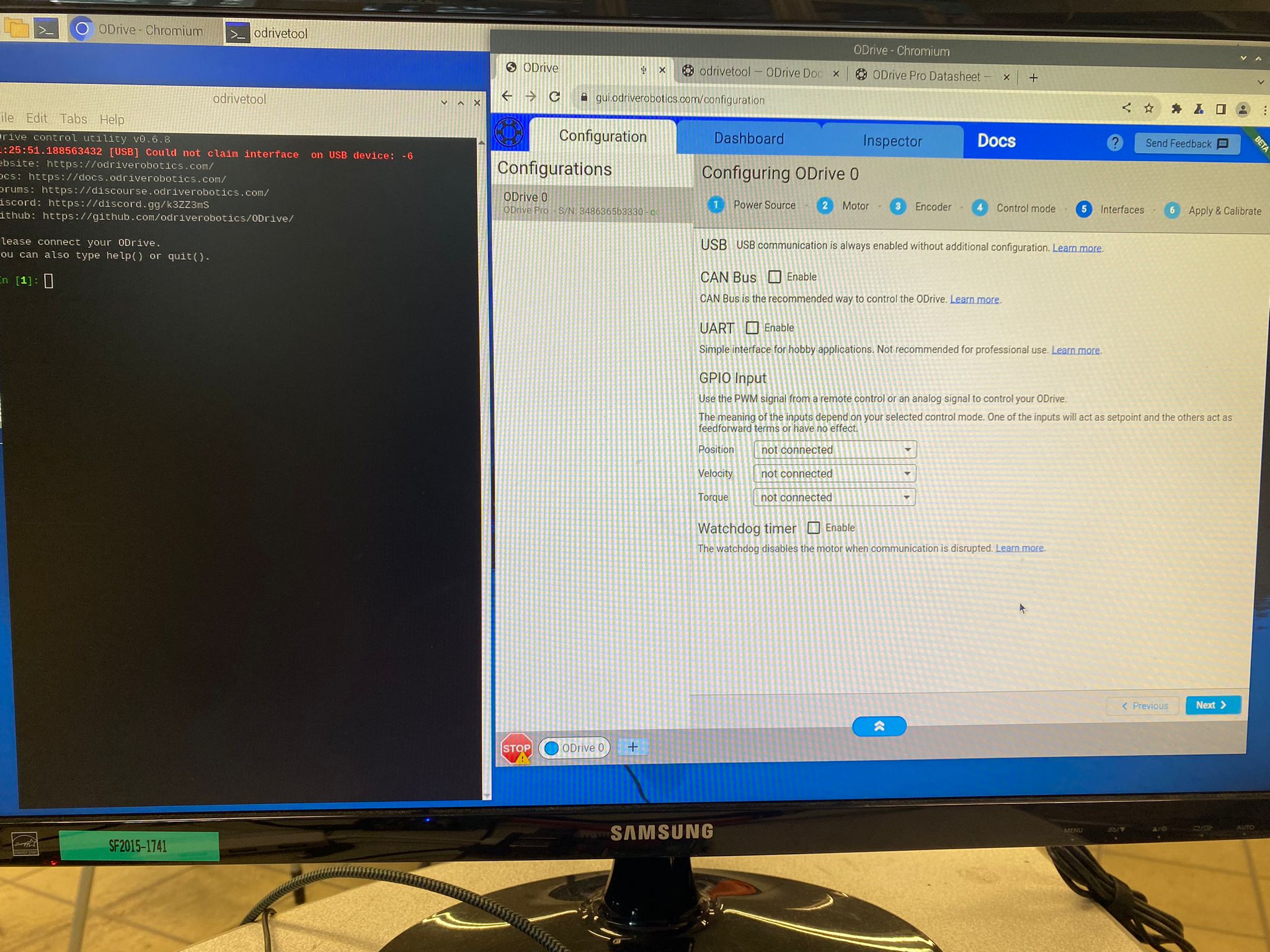
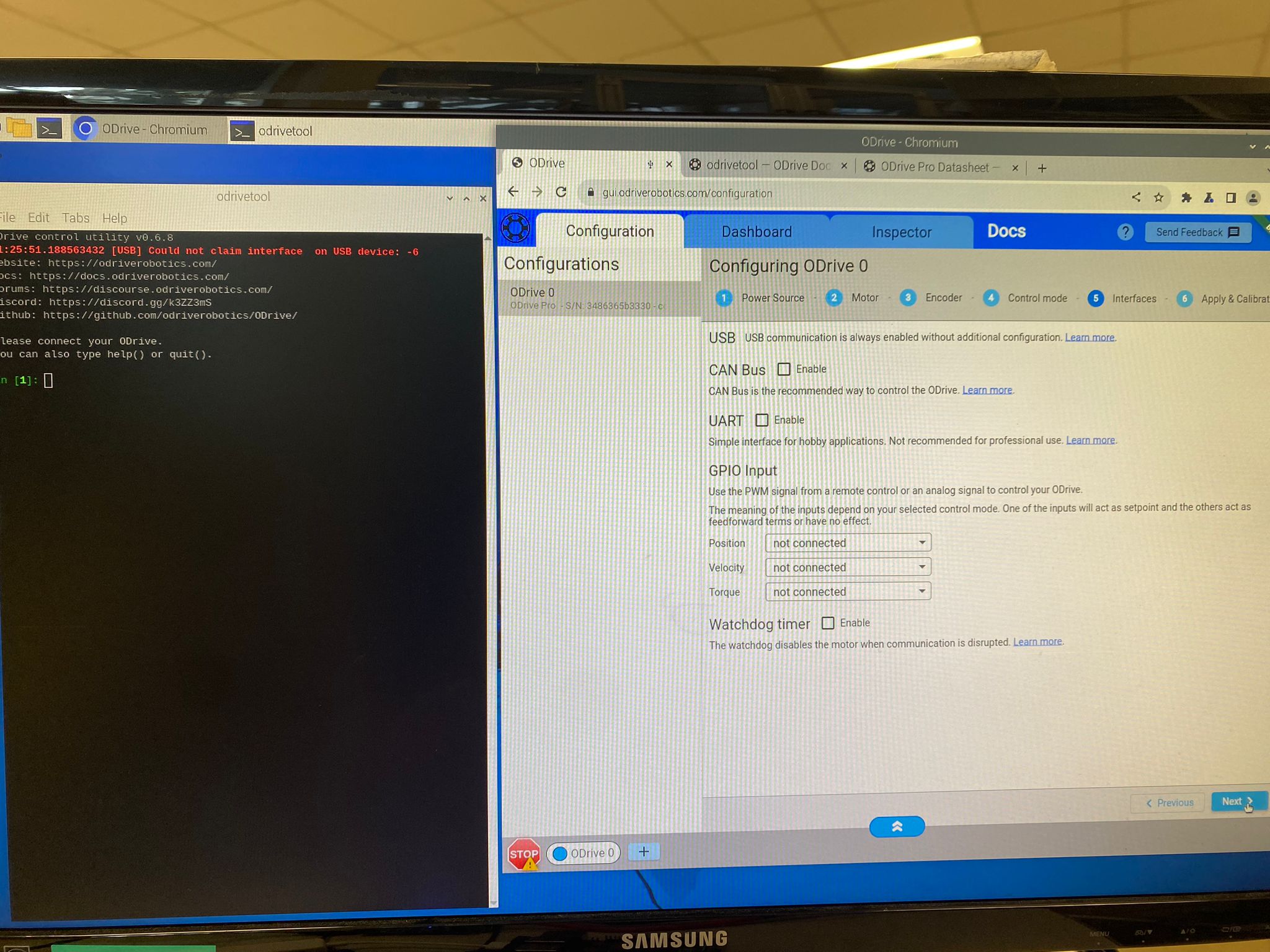
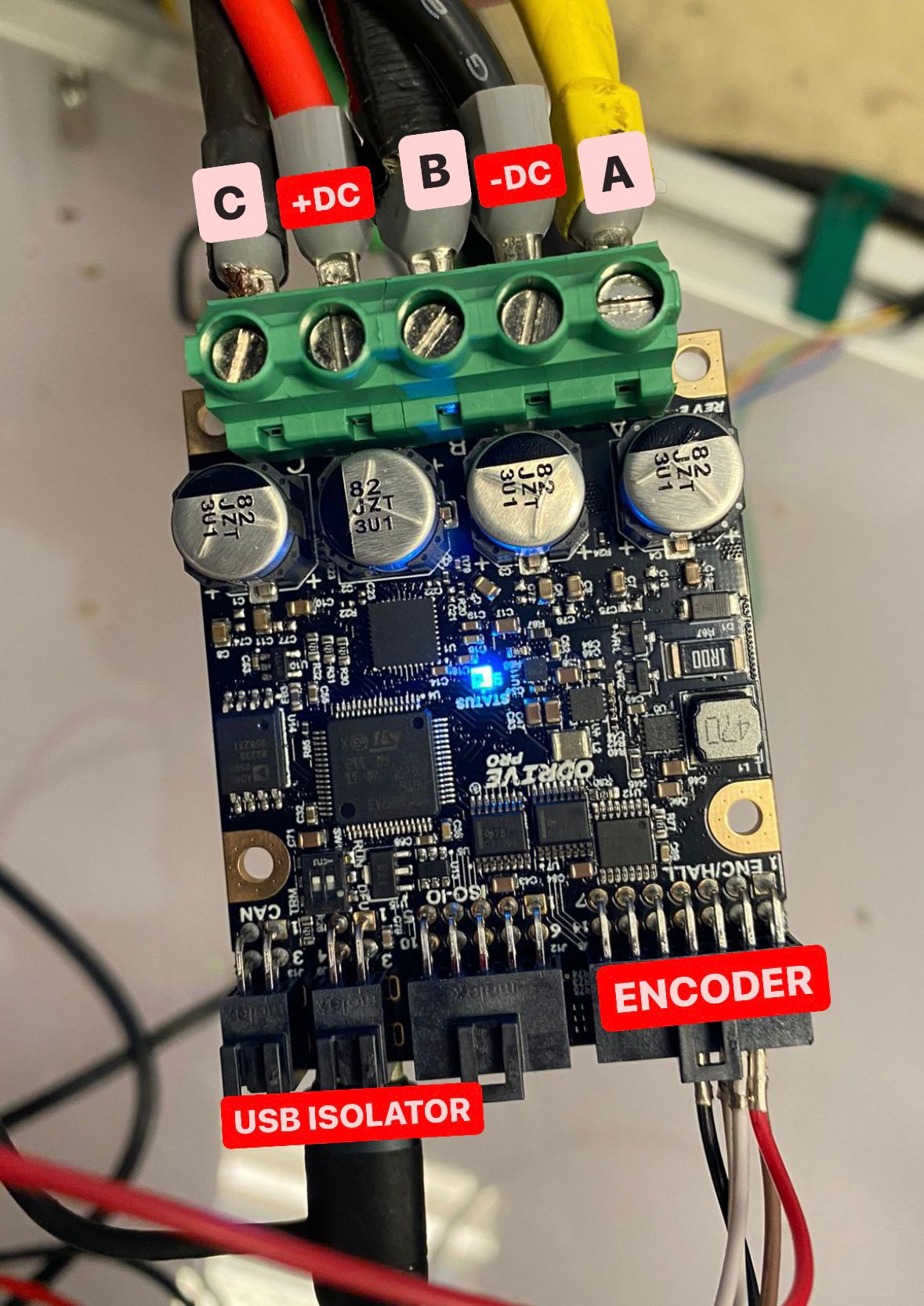
We have downloaded the Raspberry PI OS, Python 3.11, and ODrive python package. The Raspberry PI can detect the ODrive Pro. However, it cannot be detected on the ODrive GUI ODrive (odriverobotics.com). We connected the Encoder (see above connection), DC Motor, and Power Supply (12.8V) to the ODrive Pro. The Raspberry PI is connected to the power (Type C port) of the ODrive Pro.
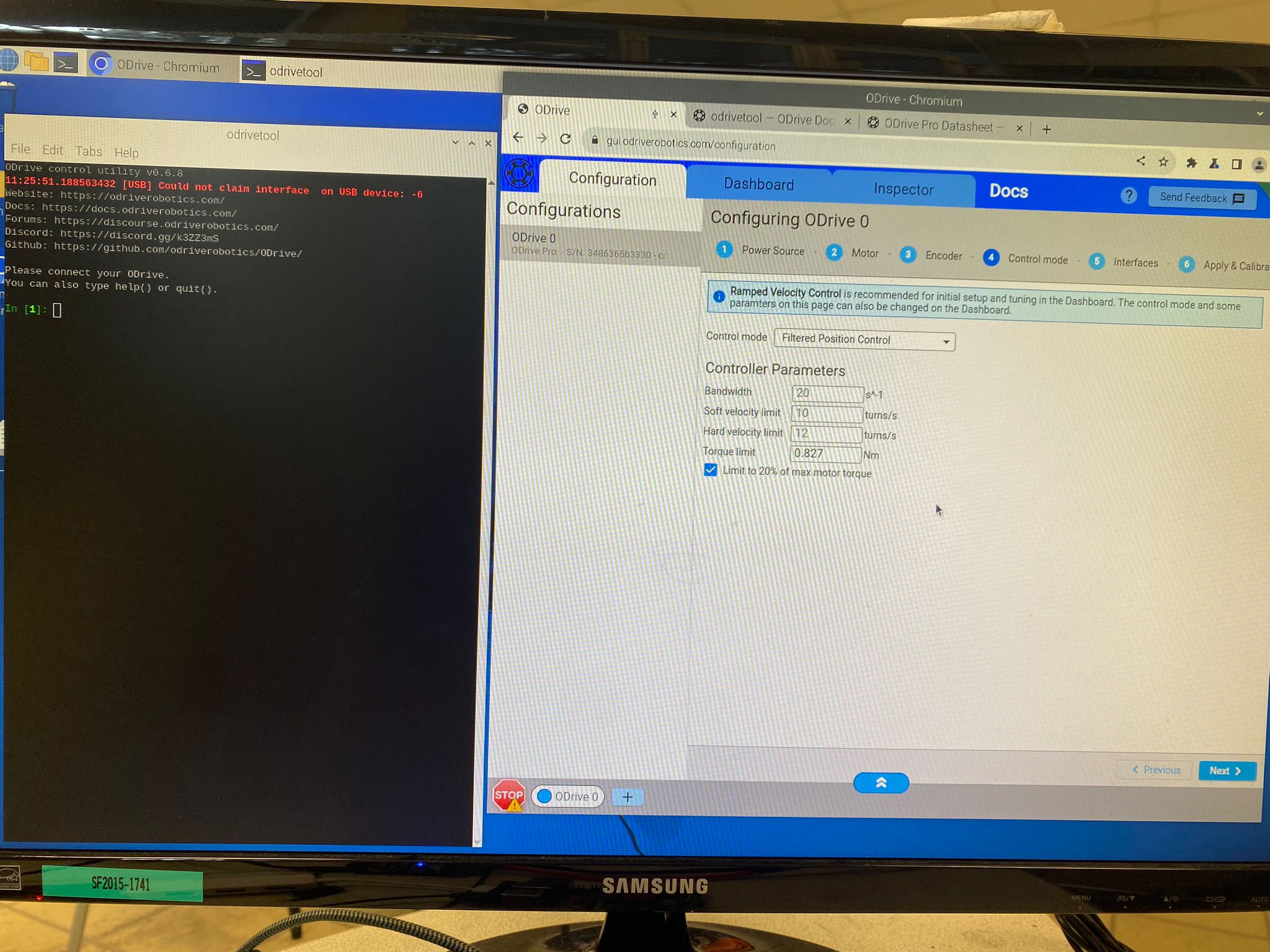
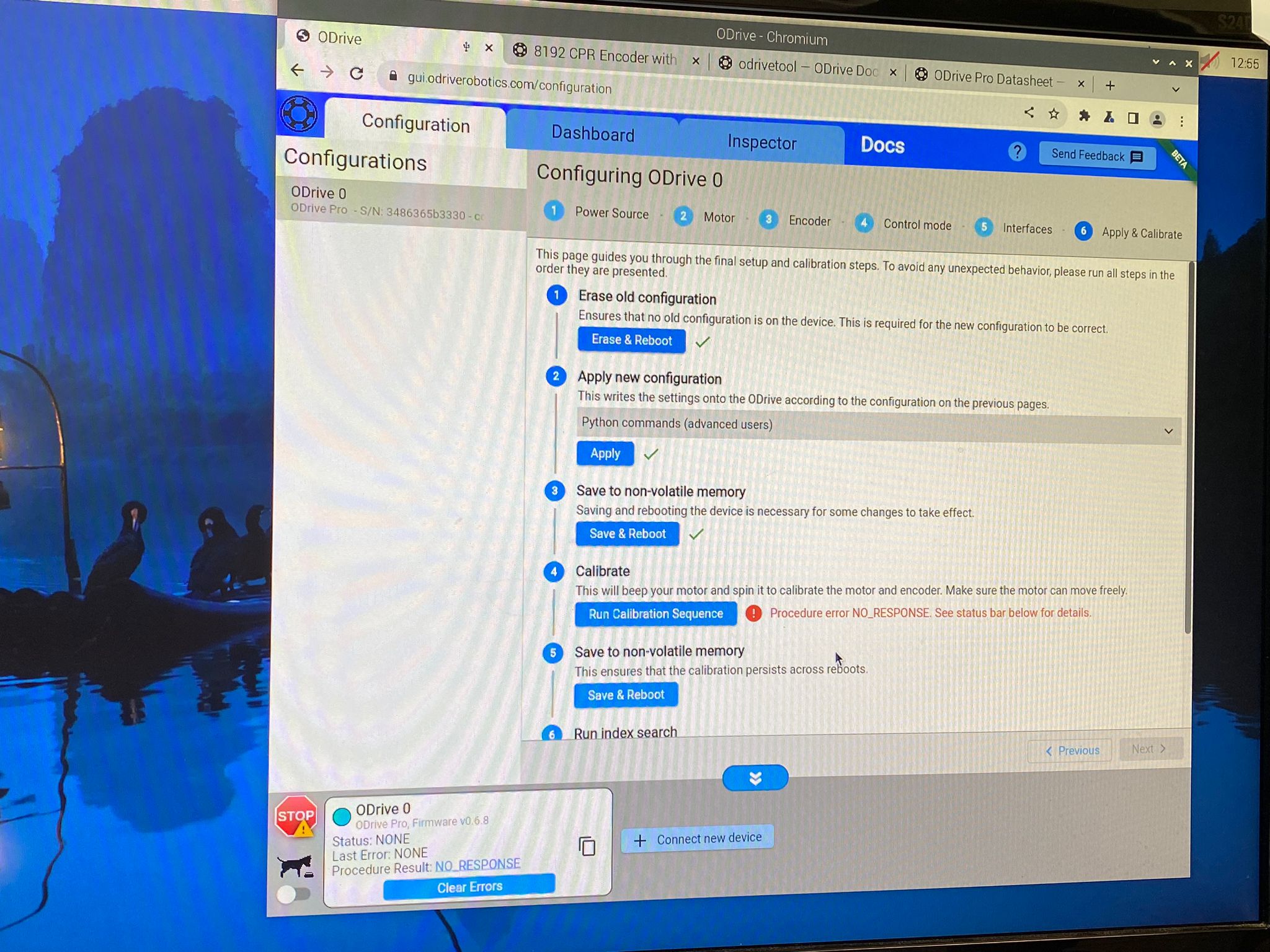
Typically, upon connection, the DC Motor will turn once clockwise and once counter-clockwise to calibrate the Encoder. We have confirmed that the ODrive Pro receives the 12.8V DC but does not redirect the power to the motor to make it spin.
What are we doing wrong? Is it the connections, or is there not enough power, or is the software incompatible?