I am using 9 ODrive Pros where every 3 are powered by independent 48V batteries that do not share a ground. This is a distributed robotic system.
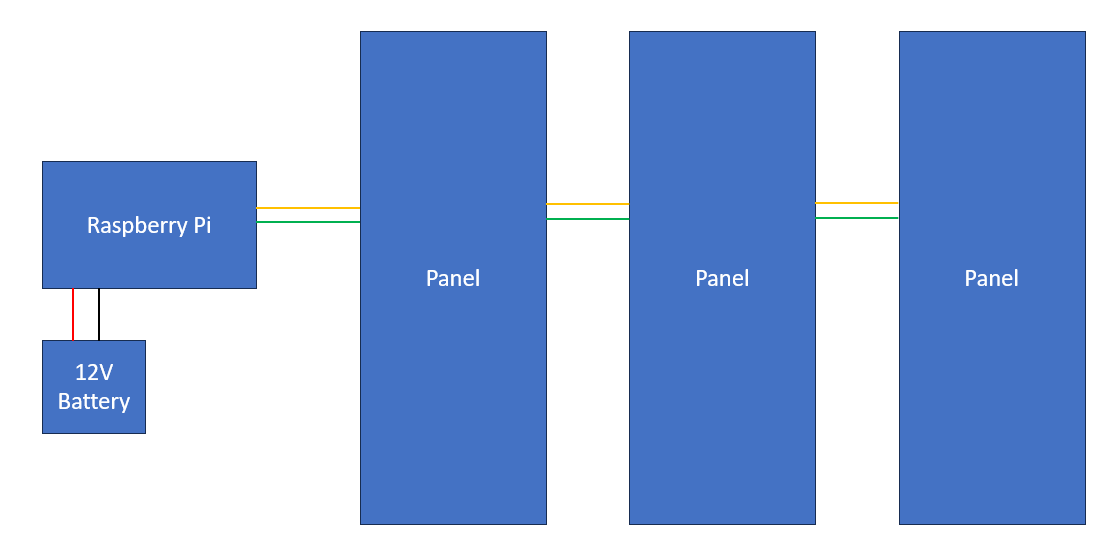
A single Raspberry Pi is used to communicate to the 9 ODrives via CANbus. The CAN interface is the PICAN2 which is not isolated. I am currently only using this with a single ODrive for developing the CAN interface software.
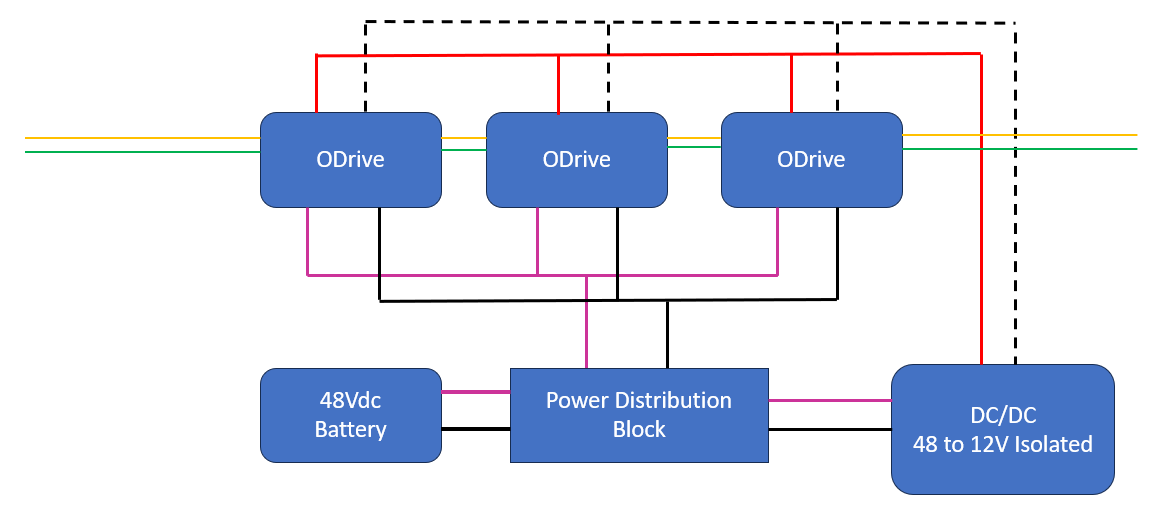
The ODrive’s documentation on running fully isolated is lacking details. I know that I will need to remove two jumpers on each drive so that the ODrive Pros do not power their CAN transceivers from internal 12V power, or reference the transceiver ground to the internal 12V logic ground. In this case I can use a local isolated 12V power supply to power the CANbus transceiver on each ODrive.
In this configuration I should NOT need to connect the -48V to CAN ground. However - do I need to connect the 3 CAN grounds together? Or can I leave them floating from each other? Would a CAN isolator (rated for 1Mbps) be advisable between the Raspberry Pi and the CAN bus? Or an isolator between each panel?
I would like the ODrive Pro documentation to be updated to include wire-level drawings of each isolation method. This bullet is the only mention of fully isolated CAN:
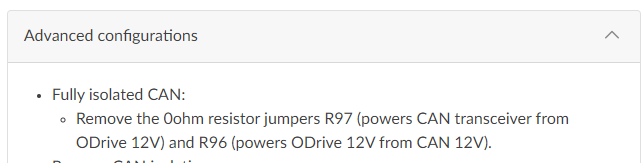
It fails to clarify that this means, by my interpretation, that the internal logic of the ODrive Pro will now be fed from the high voltage input, meaning you can only communicate with the ODrive Pro if the high voltage is present.