Configuration:
axis0.active_errors = 16777216
axis0.commutation_mapper.config.approx_init_pos = 0.000000
axis0.commutation_mapper.config.approx_init_pos_valid = false
axis0.commutation_mapper.config.circular = true
axis0.commutation_mapper.config.circular_output_range = 1.000000
axis0.commutation_mapper.config.index_gpio = 7
axis0.commutation_mapper.config.index_offset = 0.000000
axis0.commutation_mapper.config.index_offset_valid = false
axis0.commutation_mapper.config.offset = 0.000000
axis0.commutation_mapper.config.offset_valid = true
axis0.commutation_mapper.config.passive_index_search = false
axis0.commutation_mapper.config.scale = 1.000000
axis0.commutation_mapper.config.use_endstop = false
axis0.commutation_mapper.config.use_index_gpio = false
axis0.commutation_mapper.n_index_events = 0
axis0.commutation_mapper.pos_abs = 0.000000
axis0.commutation_mapper.pos_rel = 0.000000
axis0.commutation_mapper.status = 0
axis0.commutation_mapper.vel = 0.000000
axis0.commutation_mapper.working_offset = 0.000000
axis0.config.I_bus_hard_max = inf
axis0.config.I_bus_hard_min = -inf
axis0.config.I_bus_soft_max = inf
axis0.config.I_bus_soft_min = -inf
axis0.config.P_bus_soft_max = inf
axis0.config.P_bus_soft_min = -inf
axis0.config.anticogging.calib_bidirectional = true
axis0.config.anticogging.calib_coarse_integrator_gain = 10.000000
axis0.config.anticogging.calib_coarse_tuning_duration = 60.000000
axis0.config.anticogging.calib_end_vel = 0.150000
axis0.config.anticogging.calib_fine_dist_scale = 1.000000
axis0.config.anticogging.calib_fine_tuning_duration = 120.000000
axis0.config.anticogging.calib_start_vel = 1.000000
axis0.config.anticogging.enabled = false
axis0.config.anticogging.max_torque = 0.150000
axis0.config.calib_range = 0.020000
axis0.config.calib_scan_distance = 8.000000
axis0.config.calib_scan_vel = 2.000000
axis0.config.calibration_lockin.accel = 3.183099
axis0.config.calibration_lockin.current = 10.000000
axis0.config.calibration_lockin.ramp_distance = 0.500000
axis0.config.calibration_lockin.ramp_time = 0.400000
axis0.config.calibration_lockin.vel = 6.366198
axis0.config.can.bus_voltage_msg_rate_ms = 50
axis0.config.can.encoder_msg_rate_ms = 50
axis0.config.can.error_msg_rate_ms = 50
axis0.config.can.heartbeat_msg_rate_ms = 100
axis0.config.can.input_torque_scale = 1000
axis0.config.can.input_vel_scale = 1000
axis0.config.can.iq_msg_rate_ms = 50
axis0.config.can.node_id = 1
axis0.config.can.powers_msg_rate_ms = 0
axis0.config.can.temperature_msg_rate_ms = 50
axis0.config.can.torques_msg_rate_ms = 50
axis0.config.can.version_msg_rate_ms = 0
axis0.config.commutation_encoder = 4
axis0.config.commutation_encoder_bandwidth = nan
axis0.config.dir_gpio_pin = unknown_type
axis0.config.enable_error_gpio = false
axis0.config.enable_step_dir = false
axis0.config.enable_watchdog = true
axis0.config.encoder_bandwidth = 1000.000000
axis0.config.error_gpio_pin = unknown_type
axis0.config.general_lockin.accel = 20.000000
axis0.config.general_lockin.current = 10.000000
axis0.config.general_lockin.finish_distance = 100.000000
axis0.config.general_lockin.finish_on_distance = false
axis0.config.general_lockin.finish_on_vel = false
axis0.config.general_lockin.initial_pos = 0.000000
axis0.config.general_lockin.ramp_distance = 3.141593
axis0.config.general_lockin.ramp_time = 0.400000
axis0.config.general_lockin.vel = 40.000000
axis0.config.index_search_at_target_vel_only = false
axis0.config.init_pos = nan
axis0.config.init_torque = 0.000000
axis0.config.init_vel = 0.000000
axis0.config.load_encoder = 4
axis0.config.motor.acim_autoflux_attack_gain = 10.000000
axis0.config.motor.acim_autoflux_decay_gain = 1.000000
axis0.config.motor.acim_autoflux_enable = false
axis0.config.motor.acim_autoflux_min_Id = 10.000000
axis0.config.motor.acim_gain_min_flux = 10.000000
axis0.config.motor.acim_nominal_slip_vel = 2.340000
axis0.config.motor.bEMF_FF_enable = false
axis0.config.motor.calibration_current = 10.000000
axis0.config.motor.current_control_bandwidth = 1000.000000
axis0.config.motor.current_hard_max = 63.500000
axis0.config.motor.current_slew_rate_limit = 10000.000000
axis0.config.motor.current_soft_max = 43.500000
axis0.config.motor.direction = 1.000000
axis0.config.motor.ff_pm_flux_linkage = 0.000000
axis0.config.motor.ff_pm_flux_linkage_valid = false
axis0.config.motor.fw_enable = false
axis0.config.motor.fw_fb_bandwidth = 500.000000
axis0.config.motor.fw_mod_setpoint = 0.778643
axis0.config.motor.motor_model_l_d = 0.000000
axis0.config.motor.motor_model_l_dq_valid = false
axis0.config.motor.motor_model_l_q = 0.000000
axis0.config.motor.motor_type = 0
axis0.config.motor.phase_inductance = 0.000041
axis0.config.motor.phase_inductance_valid = true
axis0.config.motor.phase_resistance = 0.073503
axis0.config.motor.phase_resistance_valid = true
axis0.config.motor.pole_pairs = 7
axis0.config.motor.power_torque_report_filter_bandwidth = 8000.000000
axis0.config.motor.resistance_calib_max_voltage = 2.000000
axis0.config.motor.sensorless_observer_gain = 500.000000
axis0.config.motor.sensorless_pll_bandwidth = 500.000000
axis0.config.motor.sensorless_pm_flux_linkage = 0.000000
axis0.config.motor.sensorless_pm_flux_linkage_valid = false
axis0.config.motor.torque_constant = 0.045440
axis0.config.motor.wL_FF_enable = false
axis0.config.sensorless_ramp.accel = 31.830988
axis0.config.sensorless_ramp.current = 10.000000
axis0.config.sensorless_ramp.finish_distance = 15.915494
axis0.config.sensorless_ramp.finish_on_distance = false
axis0.config.sensorless_ramp.finish_on_vel = true
axis0.config.sensorless_ramp.initial_pos = 0.000000
axis0.config.sensorless_ramp.ramp_distance = 0.500000
axis0.config.sensorless_ramp.ramp_time = 0.400000
axis0.config.sensorless_ramp.vel = 14.000000
axis0.config.startup_closed_loop_control = true
axis0.config.startup_encoder_index_search = false
axis0.config.startup_encoder_offset_calibration = false
axis0.config.startup_homing = false
axis0.config.startup_max_wait_for_ready = 3.000000
axis0.config.startup_motor_calibration = true
axis0.config.step_dir_always_on = false
axis0.config.step_gpio_pin = unknown_type
axis0.config.torque_soft_max = inf
axis0.config.torque_soft_min = -inf
axis0.config.watchdog_timeout = 0.250000
axis0.controller.autotuning.frequency = 0.000000
axis0.controller.autotuning.pos_amplitude = 0.000000
axis0.controller.autotuning.torque_amplitude = 0.000000
axis0.controller.autotuning.vel_amplitude = 0.000000
axis0.controller.autotuning.vel_burst_factor = 0
axis0.controller.autotuning_phase = 0.000000
axis0.controller.config.absolute_setpoints = false
axis0.controller.config.circular_setpoint_range = 1.000000
axis0.controller.config.circular_setpoints = false
axis0.controller.config.commutation_vel_scale = 1.000000
axis0.controller.config.control_mode = 2
axis0.controller.config.enable_gain_scheduling = false
axis0.controller.config.enable_overspeed_error = true
axis0.controller.config.enable_torque_mode_vel_limit = true
axis0.controller.config.enable_vel_limit = true
axis0.controller.config.gain_scheduling_width = 0.001000
axis0.controller.config.homing_speed = 0.250000
axis0.controller.config.inertia = 0.000000
axis0.controller.config.input_filter_bandwidth = 20.000000
axis0.controller.config.input_mode = 1
axis0.controller.config.pos_gain = 20.000000
axis0.controller.config.spinout_electrical_power_bandwidth = 20.000000
axis0.controller.config.spinout_electrical_power_threshold = 1000.000000
axis0.controller.config.spinout_mechanical_power_bandwidth = 20.000000
axis0.controller.config.spinout_mechanical_power_threshold = -1000.000000
axis0.controller.config.steps_per_circular_range = 1024
axis0.controller.config.torque_ramp_rate = 0.010000
axis0.controller.config.use_commutation_vel = false
axis0.controller.config.use_load_encoder_for_commutation_vel = false
axis0.controller.config.vel_gain = 0.166667
axis0.controller.config.vel_integrator_gain = 0.333333
axis0.controller.config.vel_integrator_limit = inf
axis0.controller.config.vel_limit = 50.000000
axis0.controller.config.vel_limit_tolerance = 1.054054
axis0.controller.config.vel_ramp_rate = 3.330000
axis0.controller.effective_torque_setpoint = 0.000000
axis0.controller.input_pos = 0.000000
axis0.controller.input_torque = 0.000000
axis0.controller.input_vel = 0.000000
axis0.controller.pos_setpoint = 0.000000
axis0.controller.spinout_electrical_power = 0.000000
axis0.controller.spinout_mechanical_power = 0.000000
axis0.controller.torque_setpoint = 0.000000
axis0.controller.trajectory_done = true
axis0.controller.vel_integrator_torque = 0.000000
axis0.controller.vel_setpoint = 0.000000
axis0.current_state = 1
axis0.disarm_reason = 16777216
axis0.disarm_time = 3.013750
axis0.enable_pin.config.debounce_ms = 50
axis0.enable_pin.config.enabled = false
axis0.enable_pin.config.gpio_num = unknown_type
axis0.enable_pin.config.is_active_high = false
axis0.enable_pin.config.offset = 0.000000
axis0.enable_pin.state = false
axis0.interpolator.config.dynamic = true
axis0.interpolator.interpolation = 0.000000
axis0.interpolator.status = 0
axis0.is_armed = false
axis0.is_homed = false
axis0.last_drv_fault = 0
axis0.max_endstop.config.debounce_ms = 50
axis0.max_endstop.config.enabled = false
axis0.max_endstop.config.gpio_num = unknown_type
axis0.max_endstop.config.is_active_high = false
axis0.max_endstop.config.offset = 0.000000
axis0.max_endstop.state = false
axis0.mechanical_brake.config.gpio_num = unknown_type
axis0.mechanical_brake.config.is_active_low = true
axis0.min_endstop.config.debounce_ms = 50
axis0.min_endstop.config.enabled = false
axis0.min_endstop.config.gpio_num = unknown_type
axis0.min_endstop.config.is_active_high = false
axis0.min_endstop.config.offset = 0.000000
axis0.min_endstop.state = false
axis0.motor.acim_estimator.phase_offset = 0.000000
axis0.motor.acim_estimator.rotor_flux = 0.000000
axis0.motor.acim_estimator.slip_vel = 0.000000
axis0.motor.acim_estimator.stator_phase = 0.000000
axis0.motor.acim_estimator.stator_phase_vel = 0.000000
axis0.motor.alpha_beta_controller.I_bus = 0.000000
axis0.motor.alpha_beta_controller.Ialpha_measured = 0.000000
axis0.motor.alpha_beta_controller.Ibeta_measured = 0.000000
axis0.motor.alpha_beta_controller.current_meas_phA = nan
axis0.motor.alpha_beta_controller.current_meas_phB = nan
axis0.motor.alpha_beta_controller.current_meas_phC = nan
axis0.motor.alpha_beta_controller.current_meas_status_phA = 4
axis0.motor.alpha_beta_controller.current_meas_status_phB = 4
axis0.motor.alpha_beta_controller.current_meas_status_phC = 4
axis0.motor.alpha_beta_controller.max_measurable_current = 121.500000
axis0.motor.alpha_beta_controller.n_evt_current_measurement = 8605354
axis0.motor.alpha_beta_controller.n_evt_pwm_update = 2
axis0.motor.alpha_beta_controller.power = 0.000000
axis0.motor.dc_calib.a_0 = 8183.681152
axis0.motor.dc_calib.a_1 = 8175.136230
axis0.motor.dc_calib.a_2 = 8127.144043
axis0.motor.dc_calib.b_0 = 8135.963379
axis0.motor.dc_calib.b_1 = 8189.914062
axis0.motor.dc_calib.b_2 = 8182.442383
axis0.motor.dc_calib.c_0 = 8117.427734
axis0.motor.dc_calib.c_1 = 8072.333984
axis0.motor.dc_calib.c_2 = 8126.730469
axis0.motor.effective_current_lim = 43.500000
axis0.motor.electrical_power = 0.000000
axis0.motor.fet_thermistor.temperature = 32.251129
axis0.motor.foc.I_measured_report_filter_k = 1.000000
axis0.motor.foc.Id_measured = 0.000000
axis0.motor.foc.Id_setpoint = 0.000000
axis0.motor.foc.Iq_measured = 0.000000
axis0.motor.foc.Iq_setpoint = 0.000000
axis0.motor.foc.Vd_setpoint = 0.000000
axis0.motor.foc.Vq_setpoint = 0.000000
axis0.motor.foc.final_v_alpha = 0.000000
axis0.motor.foc.final_v_beta = 0.000000
axis0.motor.foc.i_gain = 73.503204
axis0.motor.foc.mod_d = 0.000000
axis0.motor.foc.mod_q = 0.000000
axis0.motor.foc.p_gain = 0.040945
axis0.motor.foc.phase = 0.000000
axis0.motor.foc.phase_vel = 0.000000
axis0.motor.foc.v_current_control_integral_d = 0.000000
axis0.motor.foc.v_current_control_integral_q = 0.000000
axis0.motor.input_id = 0.000000
axis0.motor.input_iq = 0.000000
axis0.motor.loss_power = 0.000000
axis0.motor.mechanical_power = 0.000000
axis0.motor.motor_thermistor.config.beta = 0.000000
axis0.motor.motor_thermistor.config.enabled = false
axis0.motor.motor_thermistor.config.gpio_pin = unknown_type
axis0.motor.motor_thermistor.config.r_ref = 0.000000
axis0.motor.motor_thermistor.config.t_ref = 25.000000
axis0.motor.motor_thermistor.config.temp_limit_lower = 100.000000
axis0.motor.motor_thermistor.config.temp_limit_upper = 120.000000
axis0.motor.motor_thermistor.temperature = nan
axis0.motor.resistance_calibration_I_beta = 0.000000
axis0.motor.sensorless_estimator.phase = 0.000000
axis0.motor.sensorless_estimator.phase_vel = 0.000000
axis0.motor.sensorless_estimator.pll_pos = 0.000000
axis0.motor.torque_estimate = 0.000000
axis0.observed_encoder_scale_factor = nan
axis0.pos_estimate = nan
axis0.pos_vel_mapper.config.approx_init_pos = 0.000000
axis0.pos_vel_mapper.config.approx_init_pos_valid = false
axis0.pos_vel_mapper.config.circular = false
axis0.pos_vel_mapper.config.circular_output_range = 1.000000
axis0.pos_vel_mapper.config.index_gpio = 7
axis0.pos_vel_mapper.config.index_offset = 0.000000
axis0.pos_vel_mapper.config.index_offset_valid = false
axis0.pos_vel_mapper.config.offset = 0.000000
axis0.pos_vel_mapper.config.offset_valid = false
axis0.pos_vel_mapper.config.passive_index_search = false
axis0.pos_vel_mapper.config.scale = 0.142857
axis0.pos_vel_mapper.config.use_endstop = false
axis0.pos_vel_mapper.config.use_index_gpio = false
axis0.pos_vel_mapper.n_index_events = 0
axis0.pos_vel_mapper.pos_abs = nan
axis0.pos_vel_mapper.pos_rel = 0.000000
axis0.pos_vel_mapper.status = 8
axis0.pos_vel_mapper.vel = 0.000000
axis0.pos_vel_mapper.working_offset = 0.000000
axis0.procedure_result = 3
axis0.requested_state = 0
axis0.step_dir_active = false
axis0.steps = 0
axis0.task_times.acim_estimator_update.end_time = 0
axis0.task_times.acim_estimator_update.length = 0
axis0.task_times.acim_estimator_update.max_length = 364
axis0.task_times.acim_estimator_update.start_time = 0
axis0.task_times.can_heartbeat.end_time = 0
axis0.task_times.can_heartbeat.length = 0
axis0.task_times.can_heartbeat.max_length = 0
axis0.task_times.can_heartbeat.start_time = 0
axis0.task_times.controller_update.end_time = 0
axis0.task_times.controller_update.length = 0
axis0.task_times.controller_update.max_length = 796
axis0.task_times.controller_update.start_time = 0
axis0.task_times.current_controller_update.end_time = 0
axis0.task_times.current_controller_update.length = 0
axis0.task_times.current_controller_update.max_length = 172
axis0.task_times.current_controller_update.start_time = 0
axis0.task_times.current_sense.end_time = 0
axis0.task_times.current_sense.length = 0
axis0.task_times.current_sense.max_length = 0
axis0.task_times.current_sense.start_time = 0
axis0.task_times.endstop_update.end_time = 0
axis0.task_times.endstop_update.length = 0
axis0.task_times.endstop_update.max_length = 216
axis0.task_times.endstop_update.start_time = 0
axis0.task_times.motor_update.end_time = 0
axis0.task_times.motor_update.length = 0
axis0.task_times.motor_update.max_length = 464
axis0.task_times.motor_update.start_time = 0
axis0.task_times.open_loop_vector_generator_update.end_time = 0
axis0.task_times.open_loop_vector_generator_update.length = 0
axis0.task_times.open_loop_vector_generator_update.max_length = 234
axis0.task_times.open_loop_vector_generator_update.start_time = 0
axis0.task_times.pwm_update.end_time = 0
axis0.task_times.pwm_update.length = 0
axis0.task_times.pwm_update.max_length = 0
axis0.task_times.pwm_update.start_time = 0
axis0.task_times.sensorless_estimator_update.end_time = 0
axis0.task_times.sensorless_estimator_update.length = 0
axis0.task_times.sensorless_estimator_update.max_length = 802
axis0.task_times.sensorless_estimator_update.start_time = 0
axis0.task_times.thermistor_update.end_time = 0
axis0.task_times.thermistor_update.length = 0
axis0.task_times.thermistor_update.max_length = 142
axis0.task_times.thermistor_update.start_time = 0
axis0.trap_traj.config.accel_limit = 0.500000
axis0.trap_traj.config.decel_limit = 0.500000
axis0.trap_traj.config.vel_limit = 2.000000
axis0.vel_estimate = 0.000000
bootloader_version = 0
can.config.baud_rate = 250000
can.config.data_baud_rate = 10000000
can.config.protocol = 1
can.config.tx_brs = 0
can.error = 0
can.n_restarts = 0
can.n_rx = 352
commit_hash = 3621886066
config.dc_bus_overvoltage_trip_level = 55.000000
config.dc_bus_undervoltage_trip_level = 12.500000
config.dc_max_negative_current = -43.500000
config.dc_max_positive_current = 43.500000
config.enable_uart_a = false
config.gpio0_mode = 17
config.gpio10_mode = 17
config.gpio11_mode = 17
config.gpio12_mode = 17
config.gpio13_mode = 17
config.gpio14_mode = 17
config.gpio15_analog_mapping.endpoint = unknown_type
config.gpio15_analog_mapping.max = 0.000000
config.gpio15_analog_mapping.min = 0.000000
config.gpio15_mode = 17
config.gpio16_analog_mapping.endpoint = unknown_type
config.gpio16_analog_mapping.max = 0.000000
config.gpio16_analog_mapping.min = 0.000000
config.gpio16_mode = 17
config.gpio17_mode = 17
config.gpio18_mode = 17
config.gpio1_mode = 17
config.gpio2_mode = 17
config.gpio3_mode = 17
config.gpio4_mode = 17
config.gpio5_mode = 17
config.gpio6_mode = 17
config.gpio7_mode = 17
config.gpio8_mode = 17
config.gpio8_pwm_mapping.endpoint = unknown_type
config.gpio8_pwm_mapping.max = 0.000000
config.gpio8_pwm_mapping.min = 0.000000
config.gpio9_mode = 17
config.gpio9_pwm_mapping.endpoint = unknown_type
config.gpio9_pwm_mapping.max = 0.000000
config.gpio9_pwm_mapping.min = 0.000000
config.inverter0.current_hard_max = 150.000000
config.inverter0.current_soft_max = 100.000000
config.inverter0.drv_config = 0
config.inverter0.mod_magn_max = 0.865159
config.inverter0.shunt_conductance = 1999.999878
config.inverter0.temp_limit_lower = 83.959999
config.inverter0.temp_limit_upper = 103.110001
config.max_regen_current = 0.000000
config.motor_fan.enabled = false
config.motor_fan.lower = 70.000000
config.motor_fan.upper = 80.000000
config.odrv_fan.enabled = false
config.odrv_fan.lower = 70.000000
config.odrv_fan.upper = 80.000000
config.uart0_protocol = 3
config.uart_a_baudrate = 115200
config.usb_cdc_protocol = 3
config.user_config_0 = 0
config.user_config_1 = 0
config.user_config_2 = 0
config.user_config_3 = 0
config.user_config_4 = 0
config.user_config_5 = 0
config.user_config_6 = 0
config.user_config_7 = 0
control_loop_hz = 8000
debug.hal_ticks = 1085449
encoder_estimator0.pos_estimate = 0.000000
encoder_estimator0.status = 13
encoder_estimator0.vel_estimate = 0.000000
encoder_estimator1.pos_estimate = 0.000000
encoder_estimator1.status = 13
encoder_estimator1.vel_estimate = 0.000000
fw_version_major = 0
fw_version_minor = 6
fw_version_revision = 10
fw_version_unreleased = 0
hall_encoder0.abs_pos_max = 0.000000
hall_encoder0.abs_pos_min = 0.000000
hall_encoder0.config.edge0 = nan
hall_encoder0.config.edge1 = nan
hall_encoder0.config.edge2 = nan
hall_encoder0.config.edge3 = nan
hall_encoder0.config.edge4 = nan
hall_encoder0.config.edge5 = nan
hall_encoder0.config.edges_calibrated = false
hall_encoder0.config.enabled = false
hall_encoder0.config.hall_polarity = 0
hall_encoder0.config.hall_polarity_calibrated = false
hall_encoder0.config.ignore_illegal_hall_state = false
hall_encoder0.hall_cnt = 255
hall_encoder0.raw_hall_state = 0
hall_encoder0.status = 14
hall_encoder1.abs_pos_max = 0.000000
hall_encoder1.abs_pos_min = 0.000000
hall_encoder1.config.edge0 = 0.520020
hall_encoder1.config.edge1 = 0.000000
hall_encoder1.config.edge2 = 0.000000
hall_encoder1.config.edge3 = 0.000000
hall_encoder1.config.edge4 = 0.000000
hall_encoder1.config.edge5 = 0.000000
hall_encoder1.config.edges_calibrated = false
hall_encoder1.config.enabled = true
hall_encoder1.config.hall_polarity = 0
hall_encoder1.config.hall_polarity_calibrated = false
hall_encoder1.config.ignore_illegal_hall_state = false
hall_encoder1.hall_cnt = 255
hall_encoder1.raw_hall_state = 0
hall_encoder1.status = 0
hw_version_major = 4
hw_version_minor = 4
hw_version_revision = 0
hw_version_variant = 58
ibus = 0.000000
ibus_report_filter_k = 1.000000
identify = false
inc_encoder0.config.cpr = 8192
inc_encoder0.config.enabled = false
inc_encoder0.pos_max = 0.000000
inc_encoder0.pos_min = 0.000000
inc_encoder0.pos_residual = 0.000000
inc_encoder0.raw = unknown_type
inc_encoder0.status = 14
inc_encoder1.config.cpr = 8192
inc_encoder1.config.enabled = false
inc_encoder1.pos_max = 0.000000
inc_encoder1.pos_min = 0.000000
inc_encoder1.pos_residual = 0.000000
inc_encoder1.raw = unknown_type
inc_encoder1.status = 14
issues.length = 0
misconfigured = false
n_evt_control_loop = 8704490
n_evt_sampling = 8704879
onboard_encoder0.raw = 0.494812
onboard_encoder0.status = 0
oscilloscope.pos = 0
oscilloscope.recording = false
oscilloscope.rollover = false
oscilloscope.size = 16384
reboot_required = false
rs485_encoder_group0.config.mode = 0
rs485_encoder_group0.raw = 0.000000
rs485_encoder_group0.raw32 = 0
rs485_encoder_group0.status = 10
rs485_encoder_group1.config.mode = 0
rs485_encoder_group1.raw = 0.000000
rs485_encoder_group1.raw32 = 0
rs485_encoder_group1.status = 10
serial_number = 0
spi_encoder0.config.baudrate = 1687500
spi_encoder0.config.biss_c_bits = 18
spi_encoder0.config.delay = 0.000000
spi_encoder0.config.max_error_rate = 0.005000
spi_encoder0.config.mode = 0
spi_encoder0.config.ncs_gpio = 17
spi_encoder0.inject_errors = false
spi_encoder0.n_errors = 0
spi_encoder0.raw = 0.000000
spi_encoder0.status = 14
spi_encoder0.warning = false
spi_encoder1.config.baudrate = 1687500
spi_encoder1.config.biss_c_bits = 18
spi_encoder1.config.delay = 0.000000
spi_encoder1.config.max_error_rate = 0.005000
spi_encoder1.config.mode = 0
spi_encoder1.config.ncs_gpio = 17
spi_encoder1.inject_errors = false
spi_encoder1.n_errors = 0
spi_encoder1.raw = 0.000000
spi_encoder1.status = 14
spi_encoder1.warning = false
system_stats.i2c.addr = 0
system_stats.i2c.addr_match_cnt = 0
system_stats.i2c.error_cnt = 0
system_stats.i2c.rx_cnt = 0
system_stats.max_stack_usage_axis = 716
system_stats.max_stack_usage_comms = 580
system_stats.max_stack_usage_startup = 332
system_stats.max_stack_usage_uart = 3764
system_stats.min_heap_space = 56240
system_stats.prio_axis = 3
system_stats.prio_comms = 0
system_stats.prio_startup = 0
system_stats.prio_uart = -3
system_stats.stack_size_axis = 2048
system_stats.stack_size_comms = 4096
system_stats.stack_size_startup = 2048
system_stats.stack_size_uart = 4096
system_stats.uptime = 1091309
system_stats.usb.rx_cnt = 0
system_stats.usb.tx_cnt = 0
system_stats.usb.tx_overrun_cnt = 0
task_timers_armed = false
task_times.control_loop_checks.end_time = 0
task_times.control_loop_checks.length = 0
task_times.control_loop_checks.max_length = 572
task_times.control_loop_checks.start_time = 0
task_times.control_loop_misc.end_time = 0
task_times.control_loop_misc.length = 0
task_times.control_loop_misc.max_length = 196
task_times.control_loop_misc.start_time = 0
task_times.current_sense_wait.end_time = 0
task_times.current_sense_wait.length = 0
task_times.current_sense_wait.max_length = 800
task_times.current_sense_wait.start_time = 0
task_times.dc_calib_wait.end_time = 0
task_times.dc_calib_wait.length = 0
task_times.dc_calib_wait.max_length = 15156
task_times.dc_calib_wait.start_time = 0
task_times.encoder_update.end_time = 0
task_times.encoder_update.length = 0
task_times.encoder_update.max_length = 888
task_times.encoder_update.start_time = 0
task_times.sampling.end_time = 0
task_times.sampling.length = 0
task_times.sampling.max_length = 256
task_times.sampling.start_time = 0
test_property = 0
thermistor0 = 32.159393
user_config_loaded = 5559
vbus_voltage = 48.163647
ODrive Pro module version: 0.6.10
Power supply input: 48V
Thruster configuration: T500 thruster from BlueRobotics with customized propeller
Firmware/driver: using refactored Odrive-github
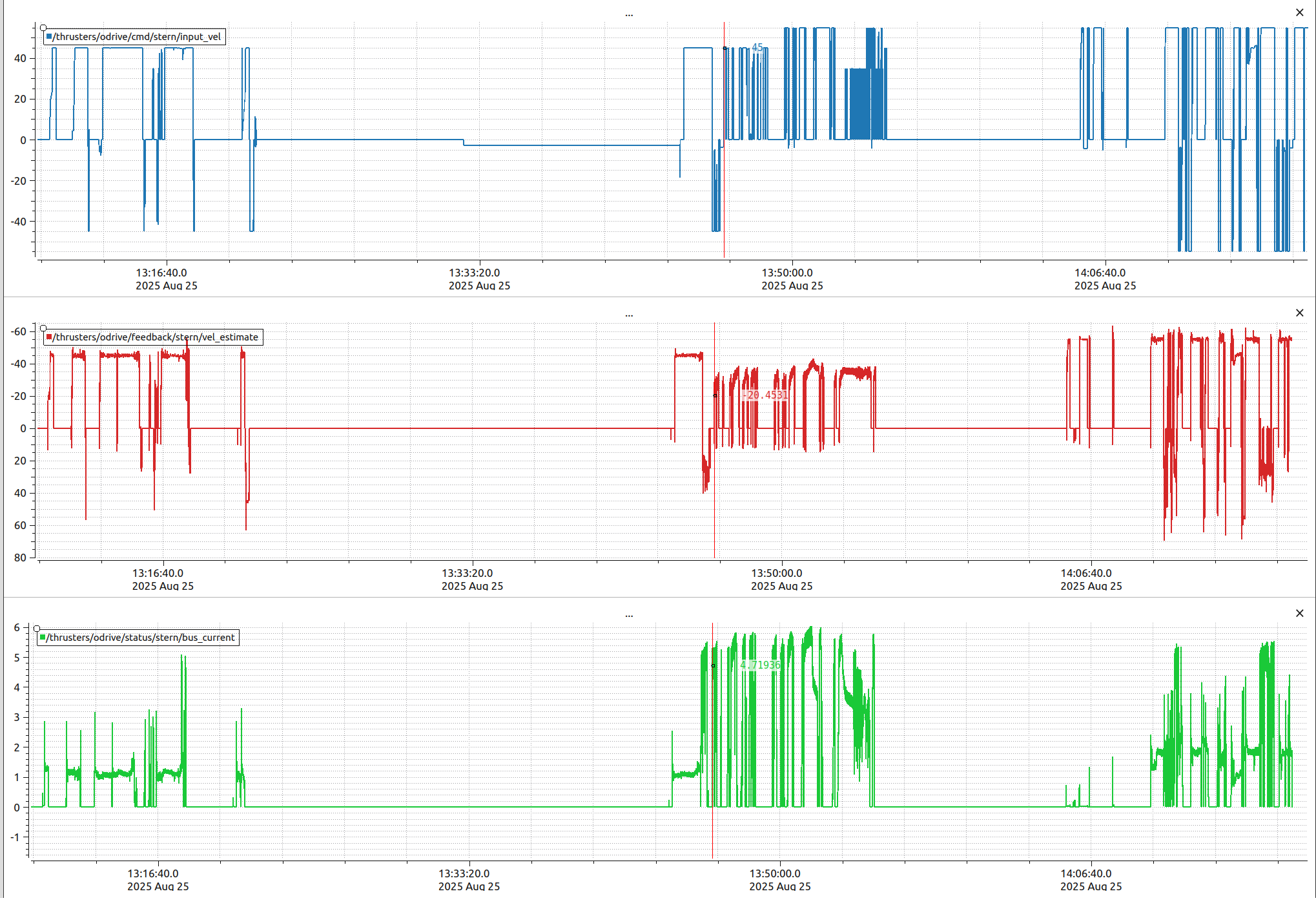
- Graph 1 → input command sent to ODrive
- Graph 2 → feedback signal from ODrive
- Graph 3 → bus_current feedback from ODrive
As seen in the attached screenshot, when we send certain command inputs to the controller, we observe that the feedback signal reports some nonzero value, even though the motor shaft itself is not moving. At the same time, we also notice a spike in bus current.
This issue has happened multiple times, especially after giving a reverse velocity command. It only occurs occasionally and does not appear to be limited to any particular input velocity range.
Could you please help us identify the possible root cause of this issue?
Hi! You’re running in sensorless control, correct? Sensorless doesn’t support low speeds (usually under 1-2V * motor KV, so here it would be 100-300 RPM or so) or changing directions. To switch to negative thrust, you would have to set the axis to idle, change the sign of axis0.config.sensorless_ramp.vel, then put the axis back in closed loop control.
Hi,
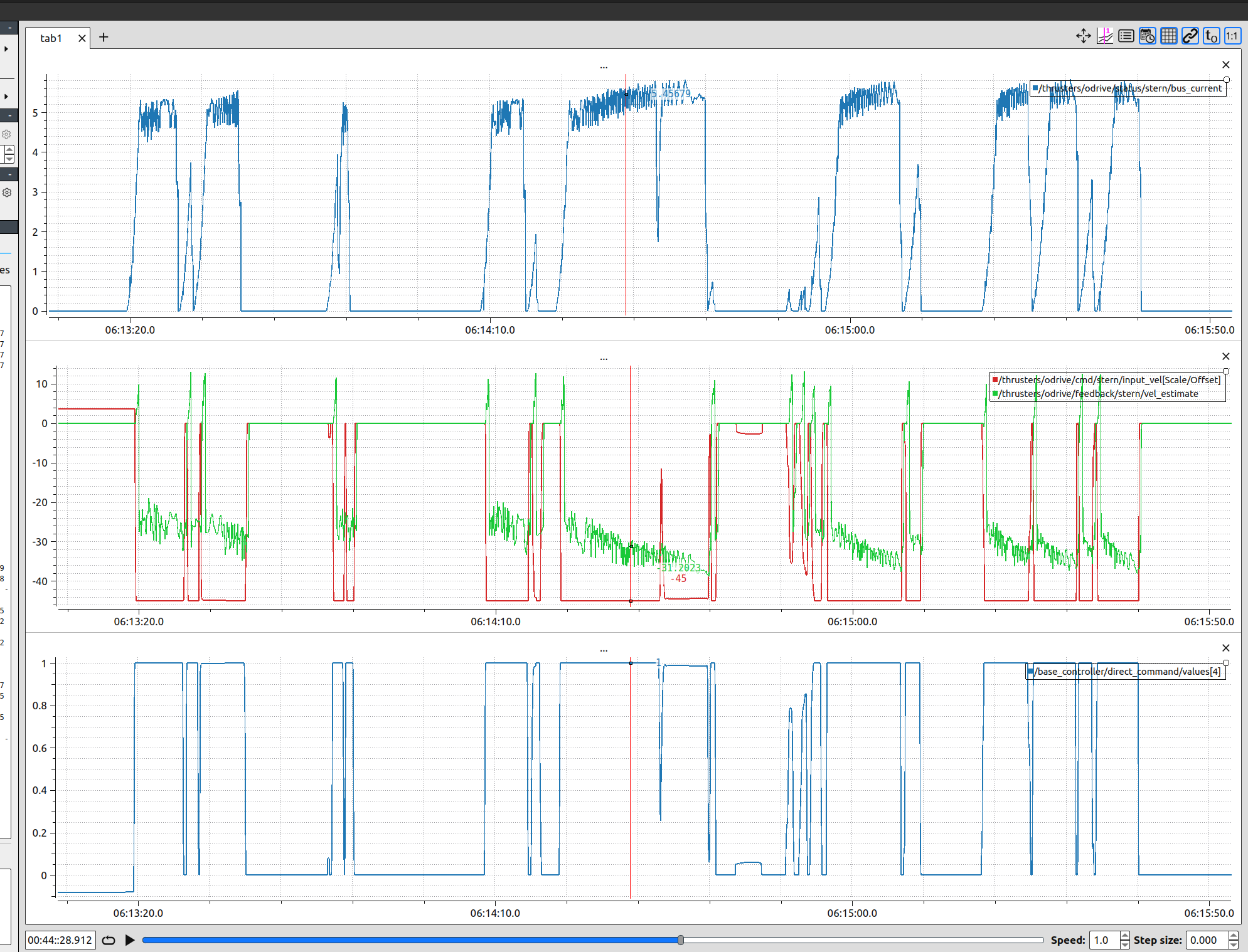
As you can see below, we are operating well beyond the minimum speeds required. the values you see here are in rad/s. I’ll check on the negative thrust implementation once again but it never gave us issues with 24V configuration.
You can see from observations that sometimes it is able to reach command velocity and sometimes not. And the motor current remains high. And again, in all these cases, even though from feedback I can see that there is some velocity output, the propeller attached to the shaft was not rotating.
For reference, I’m sharing the configuration we have for 24V input,
ODrive Pro module version: 0.6.10
Power supply input: 24V
Thruster configuration: T500 thruster from BlueRobotics with customized propeller
axis0.active_errors = 16777216
axis0.commutation_mapper.config.approx_init_pos = 0.000000
axis0.commutation_mapper.config.approx_init_pos_valid = false
axis0.commutation_mapper.config.circular = true
axis0.commutation_mapper.config.circular_output_range = 1.000000
axis0.commutation_mapper.config.index_gpio = 7
axis0.commutation_mapper.config.index_offset = 0.000000
axis0.commutation_mapper.config.index_offset_valid = false
axis0.commutation_mapper.config.offset = 0.000000
axis0.commutation_mapper.config.offset_valid = true
axis0.commutation_mapper.config.passive_index_search = false
axis0.commutation_mapper.config.scale = 1.000000
axis0.commutation_mapper.config.use_endstop = false
axis0.commutation_mapper.config.use_index_gpio = false
axis0.commutation_mapper.n_index_events = 0
axis0.commutation_mapper.pos_abs = 0.000000
axis0.commutation_mapper.pos_rel = 0.000000
axis0.commutation_mapper.status = 0
axis0.commutation_mapper.vel = 0.000000
axis0.commutation_mapper.working_offset = 0.000000
axis0.config.I_bus_hard_max = inf
axis0.config.I_bus_hard_min = -inf
axis0.config.I_bus_soft_max = inf
axis0.config.I_bus_soft_min = -inf
axis0.config.P_bus_soft_max = inf
axis0.config.P_bus_soft_min = -inf
axis0.config.anticogging.calib_bidirectional = true
axis0.config.anticogging.calib_coarse_integrator_gain = 10.000000
axis0.config.anticogging.calib_coarse_tuning_duration = 60.000000
axis0.config.anticogging.calib_end_vel = 0.150000
axis0.config.anticogging.calib_fine_dist_scale = 1.000000
axis0.config.anticogging.calib_fine_tuning_duration = 120.000000
axis0.config.anticogging.calib_start_vel = 1.000000
axis0.config.anticogging.enabled = false
axis0.config.anticogging.max_torque = 0.150000
axis0.config.calib_range = 0.020000
axis0.config.calib_scan_distance = 8.000000
axis0.config.calib_scan_vel = 2.000000
axis0.config.calibration_lockin.accel = 3.183099
axis0.config.calibration_lockin.current = 10.000000
axis0.config.calibration_lockin.ramp_distance = 0.500000
axis0.config.calibration_lockin.ramp_time = 0.400000
axis0.config.calibration_lockin.vel = 6.366198
axis0.config.can.bus_voltage_msg_rate_ms = 50
axis0.config.can.encoder_msg_rate_ms = 50
axis0.config.can.error_msg_rate_ms = 50
axis0.config.can.heartbeat_msg_rate_ms = 100
axis0.config.can.input_torque_scale = 1000
axis0.config.can.input_vel_scale = 1000
axis0.config.can.iq_msg_rate_ms = 50
axis0.config.can.node_id = 1
axis0.config.can.powers_msg_rate_ms = 0
axis0.config.can.temperature_msg_rate_ms = 50
axis0.config.can.torques_msg_rate_ms = 50
axis0.config.can.version_msg_rate_ms = 0
axis0.config.commutation_encoder = 4
axis0.config.commutation_encoder_bandwidth = nan
axis0.config.dir_gpio_pin = unknown_type
axis0.config.enable_error_gpio = false
axis0.config.enable_step_dir = false
axis0.config.enable_watchdog = true
axis0.config.encoder_bandwidth = 1000.000000
axis0.config.error_gpio_pin = unknown_type
axis0.config.general_lockin.accel = 20.000000
axis0.config.general_lockin.current = 10.000000
axis0.config.general_lockin.finish_distance = 100.000000
axis0.config.general_lockin.finish_on_distance = false
axis0.config.general_lockin.finish_on_vel = false
axis0.config.general_lockin.initial_pos = 0.000000
axis0.config.general_lockin.ramp_distance = 3.141593
axis0.config.general_lockin.ramp_time = 0.400000
axis0.config.general_lockin.vel = 40.000000
axis0.config.index_search_at_target_vel_only = false
axis0.config.init_pos = nan
axis0.config.init_torque = 0.000000
axis0.config.init_vel = 0.000000
axis0.config.load_encoder = 4
axis0.config.motor.acim_autoflux_attack_gain = 10.000000
axis0.config.motor.acim_autoflux_decay_gain = 1.000000
axis0.config.motor.acim_autoflux_enable = false
axis0.config.motor.acim_autoflux_min_Id = 10.000000
axis0.config.motor.acim_gain_min_flux = 10.000000
axis0.config.motor.acim_nominal_slip_vel = 2.340000
axis0.config.motor.bEMF_FF_enable = false
axis0.config.motor.calibration_current = 10.000000
axis0.config.motor.current_control_bandwidth = 1000.000000
axis0.config.motor.current_hard_max = 63.500000
axis0.config.motor.current_slew_rate_limit = 10000.000000
axis0.config.motor.current_soft_max = 43.500000
axis0.config.motor.direction = 1.000000
axis0.config.motor.ff_pm_flux_linkage = 0.000000
axis0.config.motor.ff_pm_flux_linkage_valid = false
axis0.config.motor.fw_enable = false
axis0.config.motor.fw_fb_bandwidth = 500.000000
axis0.config.motor.fw_mod_setpoint = 0.778643
axis0.config.motor.motor_model_l_d = 0.000000
axis0.config.motor.motor_model_l_dq_valid = false
axis0.config.motor.motor_model_l_q = 0.000000
axis0.config.motor.motor_type = 0
axis0.config.motor.phase_inductance = 0.000041
axis0.config.motor.phase_inductance_valid = true
axis0.config.motor.phase_resistance = 0.081217
axis0.config.motor.phase_resistance_valid = true
axis0.config.motor.pole_pairs = 7
axis0.config.motor.power_torque_report_filter_bandwidth = 8000.000000
axis0.config.motor.resistance_calib_max_voltage = 2.000000
axis0.config.motor.sensorless_observer_gain = 500.000000
axis0.config.motor.sensorless_pll_bandwidth = 500.000000
axis0.config.motor.sensorless_pm_flux_linkage = 0.000000
axis0.config.motor.sensorless_pm_flux_linkage_valid = false
axis0.config.motor.torque_constant = 0.045440
axis0.config.motor.wL_FF_enable = false
axis0.config.sensorless_ramp.accel = 31.830988
axis0.config.sensorless_ramp.current = 10.000000
axis0.config.sensorless_ramp.finish_distance = 15.915494
axis0.config.sensorless_ramp.finish_on_distance = false
axis0.config.sensorless_ramp.finish_on_vel = true
axis0.config.sensorless_ramp.initial_pos = 0.000000
axis0.config.sensorless_ramp.ramp_distance = 0.500000
axis0.config.sensorless_ramp.ramp_time = 0.400000
axis0.config.sensorless_ramp.vel = 14.000000
axis0.config.startup_closed_loop_control = true
axis0.config.startup_encoder_index_search = false
axis0.config.startup_encoder_offset_calibration = false
axis0.config.startup_homing = false
axis0.config.startup_max_wait_for_ready = 3.000000
axis0.config.startup_motor_calibration = true
axis0.config.step_dir_always_on = false
axis0.config.step_gpio_pin = unknown_type
axis0.config.torque_soft_max = inf
axis0.config.torque_soft_min = -inf
axis0.config.watchdog_timeout = 0.250000
axis0.controller.autotuning.frequency = 0.000000
axis0.controller.autotuning.pos_amplitude = 0.000000
axis0.controller.autotuning.torque_amplitude = 0.000000
axis0.controller.autotuning.vel_amplitude = 0.000000
axis0.controller.autotuning.vel_burst_factor = 0
axis0.controller.autotuning_phase = 0.000000
axis0.controller.config.absolute_setpoints = false
axis0.controller.config.circular_setpoint_range = 1.000000
axis0.controller.config.circular_setpoints = false
axis0.controller.config.commutation_vel_scale = 1.000000
axis0.controller.config.control_mode = 2
axis0.controller.config.enable_gain_scheduling = false
axis0.controller.config.enable_overspeed_error = true
axis0.controller.config.enable_torque_mode_vel_limit = true
axis0.controller.config.enable_vel_limit = true
axis0.controller.config.gain_scheduling_width = 0.001000
axis0.controller.config.homing_speed = 0.250000
axis0.controller.config.inertia = 0.000000
axis0.controller.config.input_filter_bandwidth = 20.000000
axis0.controller.config.input_mode = 1
axis0.controller.config.pos_gain = 20.000000
axis0.controller.config.spinout_electrical_power_bandwidth = 20.000000
axis0.controller.config.spinout_electrical_power_threshold = 1000.000000
axis0.controller.config.spinout_mechanical_power_bandwidth = 20.000000
axis0.controller.config.spinout_mechanical_power_threshold = -1000.000000
axis0.controller.config.steps_per_circular_range = 1024
axis0.controller.config.torque_ramp_rate = 0.010000
axis0.controller.config.use_commutation_vel = false
axis0.controller.config.use_load_encoder_for_commutation_vel = false
axis0.controller.config.vel_gain = 0.166667
axis0.controller.config.vel_integrator_gain = 0.333333
axis0.controller.config.vel_integrator_limit = inf
axis0.controller.config.vel_limit = 55.500000
axis0.controller.config.vel_limit_tolerance = 1.054054
axis0.controller.config.vel_ramp_rate = 10.000000
axis0.controller.effective_torque_setpoint = 0.000000
axis0.controller.input_pos = 0.000000
axis0.controller.input_torque = 0.000000
axis0.controller.input_vel = 0.000000
axis0.controller.pos_setpoint = 0.000000
axis0.controller.spinout_electrical_power = 0.000000
axis0.controller.spinout_mechanical_power = 0.000000
axis0.controller.torque_setpoint = 0.000000
axis0.controller.trajectory_done = true
axis0.controller.vel_integrator_torque = 0.000000
axis0.controller.vel_setpoint = 0.000000
axis0.current_state = 1
axis0.disarm_reason = 16777216
axis0.disarm_time = 3.013375
axis0.enable_pin.config.debounce_ms = 50
axis0.enable_pin.config.enabled = false
axis0.enable_pin.config.gpio_num = unknown_type
axis0.enable_pin.config.is_active_high = false
axis0.enable_pin.config.offset = 0.000000
axis0.enable_pin.state = false
axis0.interpolator.config.dynamic = true
axis0.interpolator.interpolation = 0.000000
axis0.interpolator.status = 0
axis0.is_armed = false
axis0.is_homed = false
axis0.last_drv_fault = 0
axis0.max_endstop.config.debounce_ms = 50
axis0.max_endstop.config.enabled = false
axis0.max_endstop.config.gpio_num = unknown_type
axis0.max_endstop.config.is_active_high = false
axis0.max_endstop.config.offset = 0.000000
axis0.max_endstop.state = false
axis0.mechanical_brake.config.gpio_num = unknown_type
axis0.mechanical_brake.config.is_active_low = true
axis0.min_endstop.config.debounce_ms = 50
axis0.min_endstop.config.enabled = false
axis0.min_endstop.config.gpio_num = unknown_type
axis0.min_endstop.config.is_active_high = false
axis0.min_endstop.config.offset = 0.000000
axis0.min_endstop.state = false
axis0.motor.acim_estimator.phase_offset = 0.000000
axis0.motor.acim_estimator.rotor_flux = 0.000000
axis0.motor.acim_estimator.slip_vel = 0.000000
axis0.motor.acim_estimator.stator_phase = 0.000000
axis0.motor.acim_estimator.stator_phase_vel = 0.000000
axis0.motor.alpha_beta_controller.I_bus = 0.000000
axis0.motor.alpha_beta_controller.Ialpha_measured = 0.000000
axis0.motor.alpha_beta_controller.Ibeta_measured = 0.000000
axis0.motor.alpha_beta_controller.current_meas_phA = nan
axis0.motor.alpha_beta_controller.current_meas_phB = nan
axis0.motor.alpha_beta_controller.current_meas_phC = nan
axis0.motor.alpha_beta_controller.current_meas_status_phA = 4
axis0.motor.alpha_beta_controller.current_meas_status_phB = 4
axis0.motor.alpha_beta_controller.current_meas_status_phC = 4
axis0.motor.alpha_beta_controller.max_measurable_current = 121.500000
axis0.motor.alpha_beta_controller.n_evt_current_measurement = 44092879
axis0.motor.alpha_beta_controller.n_evt_pwm_update = 2
axis0.motor.alpha_beta_controller.power = 0.000000
axis0.motor.dc_calib.a_0 = 8220.678711
axis0.motor.dc_calib.a_1 = 8228.106445
axis0.motor.dc_calib.a_2 = 8180.510742
axis0.motor.dc_calib.b_0 = 8270.106445
axis0.motor.dc_calib.b_1 = 8308.846680
axis0.motor.dc_calib.b_2 = 8316.372070
axis0.motor.dc_calib.c_0 = 8149.885742
axis0.motor.dc_calib.c_1 = 8101.948242
axis0.motor.dc_calib.c_2 = 8141.235840
axis0.motor.effective_current_lim = 43.500000
axis0.motor.electrical_power = 0.000000
axis0.motor.fet_thermistor.temperature = 40.617554
axis0.motor.foc.I_measured_report_filter_k = 1.000000
axis0.motor.foc.Id_measured = 0.000000
axis0.motor.foc.Id_setpoint = 0.000000
axis0.motor.foc.Iq_measured = 0.000000
axis0.motor.foc.Iq_setpoint = 0.000000
axis0.motor.foc.Vd_setpoint = 0.000000
axis0.motor.foc.Vq_setpoint = 0.000000
axis0.motor.foc.final_v_alpha = 0.000000
axis0.motor.foc.final_v_beta = 0.000000
axis0.motor.foc.i_gain = 81.216644
axis0.motor.foc.mod_d = 0.000000
axis0.motor.foc.mod_q = 0.000000
axis0.motor.foc.p_gain = 0.040914
axis0.motor.foc.phase = 0.000000
axis0.motor.foc.phase_vel = 0.000000
axis0.motor.foc.v_current_control_integral_d = 0.000000
axis0.motor.foc.v_current_control_integral_q = 0.000000
axis0.motor.input_id = 0.000000
axis0.motor.input_iq = 0.000000
axis0.motor.loss_power = 0.000000
axis0.motor.mechanical_power = 0.000000
axis0.motor.motor_thermistor.config.beta = 0.000000
axis0.motor.motor_thermistor.config.enabled = false
axis0.motor.motor_thermistor.config.gpio_pin = unknown_type
axis0.motor.motor_thermistor.config.r_ref = 0.000000
axis0.motor.motor_thermistor.config.t_ref = 25.000000
axis0.motor.motor_thermistor.config.temp_limit_lower = 100.000000
axis0.motor.motor_thermistor.config.temp_limit_upper = 120.000000
axis0.motor.motor_thermistor.temperature = nan
axis0.motor.resistance_calibration_I_beta = 0.000000
axis0.motor.sensorless_estimator.phase = 0.000000
axis0.motor.sensorless_estimator.phase_vel = 0.000000
axis0.motor.sensorless_estimator.pll_pos = 0.000000
axis0.motor.torque_estimate = 0.000000
axis0.observed_encoder_scale_factor = nan
axis0.pos_estimate = nan
axis0.pos_vel_mapper.config.approx_init_pos = 0.000000
axis0.pos_vel_mapper.config.approx_init_pos_valid = false
axis0.pos_vel_mapper.config.circular = false
axis0.pos_vel_mapper.config.circular_output_range = 1.000000
axis0.pos_vel_mapper.config.index_gpio = 7
axis0.pos_vel_mapper.config.index_offset = 0.000000
axis0.pos_vel_mapper.config.index_offset_valid = false
axis0.pos_vel_mapper.config.offset = 0.000000
axis0.pos_vel_mapper.config.offset_valid = false
axis0.pos_vel_mapper.config.passive_index_search = false
axis0.pos_vel_mapper.config.scale = 0.142857
axis0.pos_vel_mapper.config.use_endstop = false
axis0.pos_vel_mapper.config.use_index_gpio = false
axis0.pos_vel_mapper.n_index_events = 0
axis0.pos_vel_mapper.pos_abs = nan
axis0.pos_vel_mapper.pos_rel = 0.000000
axis0.pos_vel_mapper.status = 8
axis0.pos_vel_mapper.vel = 0.000000
axis0.pos_vel_mapper.working_offset = 0.000000
axis0.procedure_result = 3
axis0.requested_state = 0
axis0.step_dir_active = false
axis0.steps = 0
axis0.task_times.acim_estimator_update.end_time = 0
axis0.task_times.acim_estimator_update.length = 0
axis0.task_times.acim_estimator_update.max_length = 366
axis0.task_times.acim_estimator_update.start_time = 0
axis0.task_times.can_heartbeat.end_time = 0
axis0.task_times.can_heartbeat.length = 0
axis0.task_times.can_heartbeat.max_length = 0
axis0.task_times.can_heartbeat.start_time = 0
axis0.task_times.controller_update.end_time = 0
axis0.task_times.controller_update.length = 0
axis0.task_times.controller_update.max_length = 796
axis0.task_times.controller_update.start_time = 0
axis0.task_times.current_controller_update.end_time = 0
axis0.task_times.current_controller_update.length = 0
axis0.task_times.current_controller_update.max_length = 172
axis0.task_times.current_controller_update.start_time = 0
axis0.task_times.current_sense.end_time = 0
axis0.task_times.current_sense.length = 0
axis0.task_times.current_sense.max_length = 0
axis0.task_times.current_sense.start_time = 0
axis0.task_times.endstop_update.end_time = 0
axis0.task_times.endstop_update.length = 0
axis0.task_times.endstop_update.max_length = 216
axis0.task_times.endstop_update.start_time = 0
axis0.task_times.motor_update.end_time = 0
axis0.task_times.motor_update.length = 0
axis0.task_times.motor_update.max_length = 464
axis0.task_times.motor_update.start_time = 0
axis0.task_times.open_loop_vector_generator_update.end_time = 0
axis0.task_times.open_loop_vector_generator_update.length = 0
axis0.task_times.open_loop_vector_generator_update.max_length = 254
axis0.task_times.open_loop_vector_generator_update.start_time = 0
axis0.task_times.pwm_update.end_time = 0
axis0.task_times.pwm_update.length = 0
axis0.task_times.pwm_update.max_length = 0
axis0.task_times.pwm_update.start_time = 0
axis0.task_times.sensorless_estimator_update.end_time = 0
axis0.task_times.sensorless_estimator_update.length = 0
axis0.task_times.sensorless_estimator_update.max_length = 786
axis0.task_times.sensorless_estimator_update.start_time = 0
axis0.task_times.thermistor_update.end_time = 0
axis0.task_times.thermistor_update.length = 0
axis0.task_times.thermistor_update.max_length = 142
axis0.task_times.thermistor_update.start_time = 0
axis0.trap_traj.config.accel_limit = 0.500000
axis0.trap_traj.config.decel_limit = 0.500000
axis0.trap_traj.config.vel_limit = 2.000000
axis0.vel_estimate = 0.000000
bootloader_version = 131072
can.config.baud_rate = 250000
can.config.data_baud_rate = 10000000
can.config.protocol = 1
can.config.tx_brs = 0
can.error = 0
can.n_restarts = 0
can.n_rx = 1470
commit_hash = 3621886066
config.dc_bus_overvoltage_trip_level = 30.000000
config.dc_bus_undervoltage_trip_level = 12.500000
config.dc_max_negative_current = -43.500000
config.dc_max_positive_current = 43.500000
config.enable_uart_a = false
config.gpio0_mode = 17
config.gpio10_mode = 17
config.gpio11_mode = 17
config.gpio12_mode = 17
config.gpio13_mode = 17
config.gpio14_mode = 17
config.gpio15_analog_mapping.endpoint = unknown_type
config.gpio15_analog_mapping.max = 0.000000
config.gpio15_analog_mapping.min = 0.000000
config.gpio15_mode = 17
config.gpio16_analog_mapping.endpoint = unknown_type
config.gpio16_analog_mapping.max = 0.000000
config.gpio16_analog_mapping.min = 0.000000
config.gpio16_mode = 17
config.gpio17_mode = 17
config.gpio18_mode = 17
config.gpio1_mode = 17
config.gpio2_mode = 17
config.gpio3_mode = 17
config.gpio4_mode = 17
config.gpio5_mode = 17
config.gpio6_mode = 17
config.gpio7_mode = 17
config.gpio8_mode = 17
config.gpio8_pwm_mapping.endpoint = unknown_type
config.gpio8_pwm_mapping.max = 0.000000
config.gpio8_pwm_mapping.min = 0.000000
config.gpio9_mode = 17
config.gpio9_pwm_mapping.endpoint = unknown_type
config.gpio9_pwm_mapping.max = 0.000000
config.gpio9_pwm_mapping.min = 0.000000
config.inverter0.current_hard_max = 150.000000
config.inverter0.current_soft_max = 100.000000
config.inverter0.drv_config = 0
config.inverter0.mod_magn_max = 0.865159
config.inverter0.shunt_conductance = 1999.999878
config.inverter0.temp_limit_lower = 83.959999
config.inverter0.temp_limit_upper = 103.110001
config.max_regen_current = 0.000000
config.motor_fan.enabled = false
config.motor_fan.lower = 70.000000
config.motor_fan.upper = 80.000000
config.odrv_fan.enabled = false
config.odrv_fan.lower = 70.000000
config.odrv_fan.upper = 80.000000
config.uart0_protocol = 3
config.uart_a_baudrate = 115200
config.usb_cdc_protocol = 3
config.user_config_0 = 0
config.user_config_1 = 0
config.user_config_2 = 0
config.user_config_3 = 0
config.user_config_4 = 0
config.user_config_5 = 0
config.user_config_6 = 0
config.user_config_7 = 0
control_loop_hz = 8000
debug.hal_ticks = 5518352
encoder_estimator0.pos_estimate = 0.000000
encoder_estimator0.status = 13
encoder_estimator0.vel_estimate = 0.000000
encoder_estimator1.pos_estimate = 0.000000
encoder_estimator1.status = 13
encoder_estimator1.vel_estimate = 0.000000
fw_version_major = 0
fw_version_minor = 6
fw_version_revision = 10
fw_version_unreleased = 0
hall_encoder0.abs_pos_max = 0.000000
hall_encoder0.abs_pos_min = 0.000000
hall_encoder0.config.edge0 = nan
hall_encoder0.config.edge1 = nan
hall_encoder0.config.edge2 = nan
hall_encoder0.config.edge3 = nan
hall_encoder0.config.edge4 = nan
hall_encoder0.config.edge5 = nan
hall_encoder0.config.edges_calibrated = false
hall_encoder0.config.enabled = false
hall_encoder0.config.hall_polarity = 0
hall_encoder0.config.hall_polarity_calibrated = false
hall_encoder0.config.ignore_illegal_hall_state = false
hall_encoder0.hall_cnt = 255
hall_encoder0.raw_hall_state = 0
hall_encoder0.status = 14
hall_encoder1.abs_pos_max = 0.000000
hall_encoder1.abs_pos_min = 0.000000
hall_encoder1.config.edge0 = 0.168091
hall_encoder1.config.edge1 = 0.000000
hall_encoder1.config.edge2 = 0.000000
hall_encoder1.config.edge3 = 0.000000
hall_encoder1.config.edge4 = 0.000000
hall_encoder1.config.edge5 = 0.000000
hall_encoder1.config.edges_calibrated = false
hall_encoder1.config.enabled = true
hall_encoder1.config.hall_polarity = 0
hall_encoder1.config.hall_polarity_calibrated = false
hall_encoder1.config.ignore_illegal_hall_state = false
hall_encoder1.hall_cnt = 255
hall_encoder1.raw_hall_state = 0
hall_encoder1.status = 0
hw_version_major = 4
hw_version_minor = 4
hw_version_revision = 0
hw_version_variant = 58
ibus = 0.000000
ibus_report_filter_k = 1.000000
identify = false
inc_encoder0.config.cpr = 8192
inc_encoder0.config.enabled = false
inc_encoder0.pos_max = 0.000000
inc_encoder0.pos_min = 0.000000
inc_encoder0.pos_residual = 0.000000
inc_encoder0.raw = unknown_type
inc_encoder0.status = 14
inc_encoder1.config.cpr = 8192
inc_encoder1.config.enabled = false
inc_encoder1.pos_max = 0.000000
inc_encoder1.pos_min = 0.000000
inc_encoder1.pos_residual = 0.000000
inc_encoder1.raw = unknown_type
inc_encoder1.status = 14
issues.length = 0
misconfigured = false
n_evt_control_loop = 44160398
n_evt_sampling = 44160656
onboard_encoder0.raw = 0.928345
onboard_encoder0.status = 0
oscilloscope.pos = 0
oscilloscope.recording = false
oscilloscope.rollover = false
oscilloscope.size = 16384
reboot_required = false
rs485_encoder_group0.config.mode = 0
rs485_encoder_group0.raw = 0.000000
rs485_encoder_group0.raw32 = 0
rs485_encoder_group0.status = 10
rs485_encoder_group1.config.mode = 0
rs485_encoder_group1.raw = 0.000000
rs485_encoder_group1.raw32 = 0
rs485_encoder_group1.status = 10
serial_number = 0
spi_encoder0.config.baudrate = 1687500
spi_encoder0.config.biss_c_bits = 18
spi_encoder0.config.delay = 0.000000
spi_encoder0.config.max_error_rate = 0.005000
spi_encoder0.config.mode = 0
spi_encoder0.config.ncs_gpio = 17
spi_encoder0.inject_errors = false
spi_encoder0.n_errors = 0
spi_encoder0.raw = 0.000000
spi_encoder0.status = 14
spi_encoder0.warning = false
spi_encoder1.config.baudrate = 1687500
spi_encoder1.config.biss_c_bits = 18
spi_encoder1.config.delay = 0.000000
spi_encoder1.config.max_error_rate = 0.005000
spi_encoder1.config.mode = 0
spi_encoder1.config.ncs_gpio = 17
spi_encoder1.inject_errors = false
spi_encoder1.n_errors = 0
spi_encoder1.raw = 0.000000
spi_encoder1.status = 14
spi_encoder1.warning = false
system_stats.i2c.addr = 0
system_stats.i2c.addr_match_cnt = 0
system_stats.i2c.error_cnt = 0
system_stats.i2c.rx_cnt = 0
system_stats.max_stack_usage_axis = 716
system_stats.max_stack_usage_comms = 612
system_stats.max_stack_usage_startup = 332
system_stats.max_stack_usage_uart = 3764
system_stats.min_heap_space = 56240
system_stats.prio_axis = 3
system_stats.prio_comms = 0
system_stats.prio_startup = 0
system_stats.prio_uart = -3
system_stats.stack_size_axis = 2048
system_stats.stack_size_comms = 4096
system_stats.stack_size_startup = 2048
system_stats.stack_size_uart = 4096
system_stats.uptime = 5522350
system_stats.usb.rx_cnt = 0
system_stats.usb.tx_cnt = 0
system_stats.usb.tx_overrun_cnt = 0
task_timers_armed = false
task_times.control_loop_checks.end_time = 0
task_times.control_loop_checks.length = 0
task_times.control_loop_checks.max_length = 572
task_times.control_loop_checks.start_time = 0
task_times.control_loop_misc.end_time = 0
task_times.control_loop_misc.length = 0
task_times.control_loop_misc.max_length = 196
task_times.control_loop_misc.start_time = 0
task_times.current_sense_wait.end_time = 0
task_times.current_sense_wait.length = 0
task_times.current_sense_wait.max_length = 852
task_times.current_sense_wait.start_time = 0
task_times.dc_calib_wait.end_time = 0
task_times.dc_calib_wait.length = 0
task_times.dc_calib_wait.max_length = 15124
task_times.dc_calib_wait.start_time = 0
task_times.encoder_update.end_time = 0
task_times.encoder_update.length = 0
task_times.encoder_update.max_length = 902
task_times.encoder_update.start_time = 0
task_times.sampling.end_time = 0
task_times.sampling.length = 0
task_times.sampling.max_length = 270
task_times.sampling.start_time = 0
test_property = 0
thermistor0 = 40.621429
user_config_loaded = 5559
vbus_voltage = 26.456703
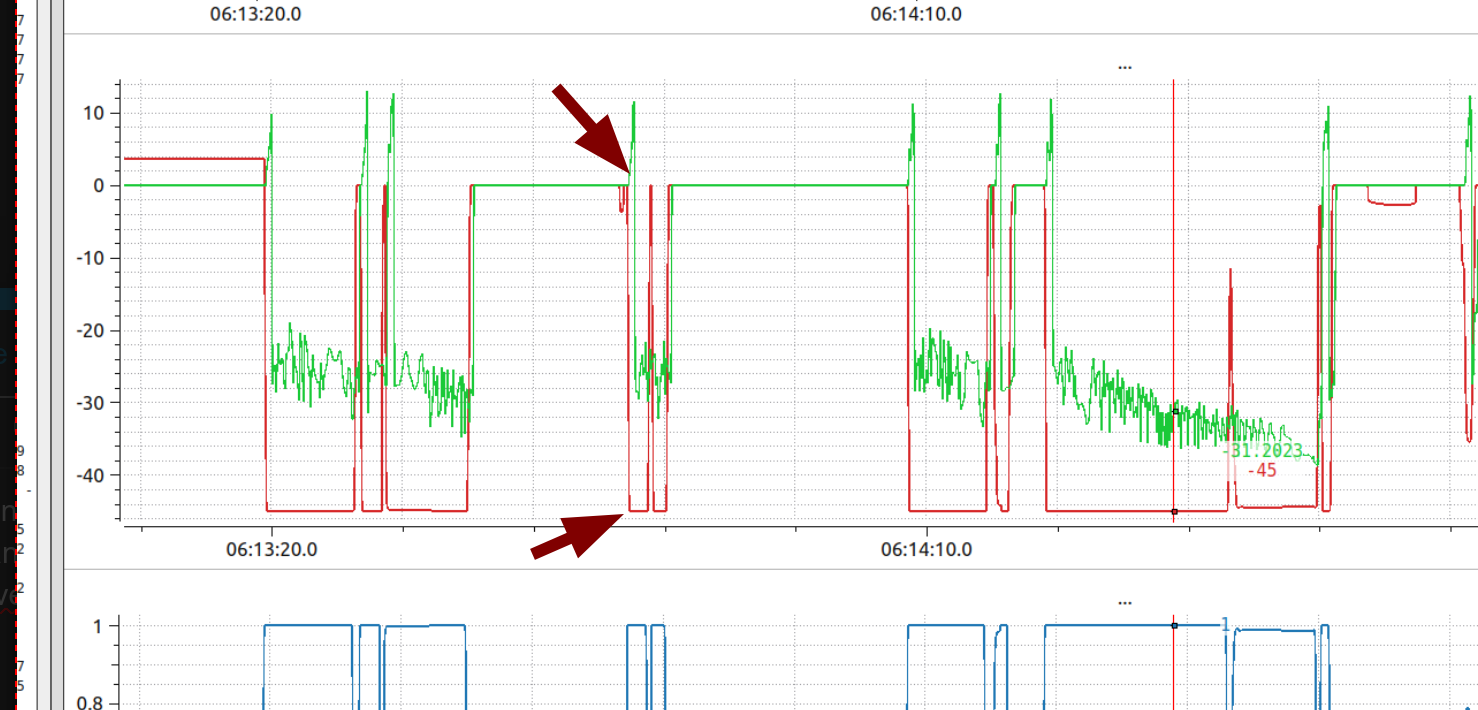
Correct me if I’m wrong, but it looks like in this graph you’re attempting to bring the speed to zero only via the input_vel command? That’s not supported, since it would require sensorless control at zero speed – if you want to stop the propeller, you will have to put the ODrive into IDLE, and then put it back into closed loop in order to start it again, so that the ODrive can go back through the ramp-up procedure.