okelk
1
Hi!
I’m working with Hoverbaord Motors and an Odrive S1.
I selected Botwheel and Hall encoders in the GUI and keep getting ILLEGAL_HALL_STATE when running the callibration sequence.
I connected following wires from the encoder
Red - 5V
Black - GND
Yellow - HALL A, 21
Blue - HALL B, 22
Green - HALL Z, 20 EDIT: I think this was the problem. supposed to be connected to 'HALL C"
Just to make sure I even tested two different pairs of Hoverbaord motor - same result
This is the error:
{
“fw_version”: “0.6.6”,
“commit_hash”: 307587176,
“product”: “5.2.0”,
“active_errors”: 0,
“active_errors_str”: “NONE”,
“disarm_reason”: 0,
“disarm_reason_str”: “NONE”,
“procedure_result”: 10,
“procedure_result_str”: “ILLEGAL_HALL_STATE”,
“last_drv_fault”: 0,
“internal_issues”: 0
}
Any ideas what might be the issue or where to start troubleshooting?
kneave
2
Have you added filter capacitors on the inputs on the ODrive? I’m not sure if they are needed on newer versions but I needed them on my 3.6 board
okelk
3
as indicated by @Nicholas_Schneider in this thread they are not needed on the S1
2 Likes
i am also facing the same issue.
It would be helpful if you could tell me a solution other than installing a capacitor.
okelk
5
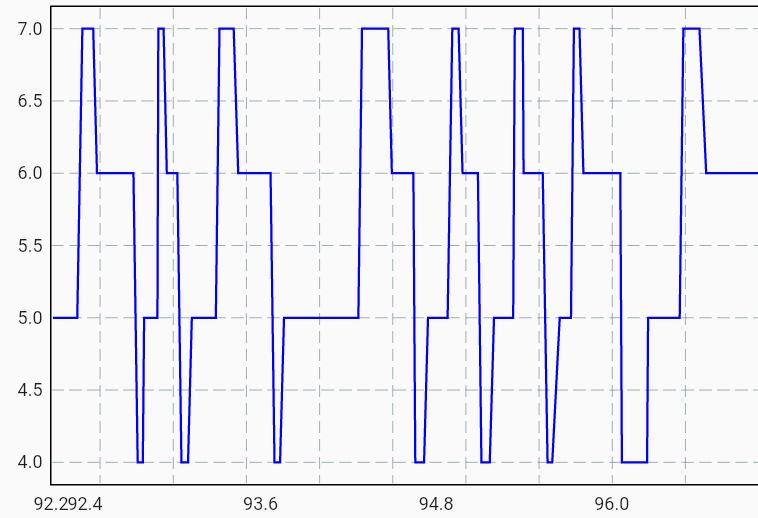
This is what it looks like when I plot raw_hall_state in the GUI and i turn the motor by hand. looks fine to me…or not?
okelk
6
ok…looked at it with fresh eyes today and connected my green encoder wire to “HALL C” and the calibration finishes.
I connected it to ‘ENC0 Z’ because the green wire was connected to a ‘Z’ pin in the old Hoverboard guide for the odrive 3.X …
I think my issue is resolved…still looking forward to a updated Hoverbaord guide!
2 Likes
i am also facing the same issue.
It would be helpful if you could tell me a solution other than installing a capacitor.
okelk
9
to which pins did you connect the hall sensor?