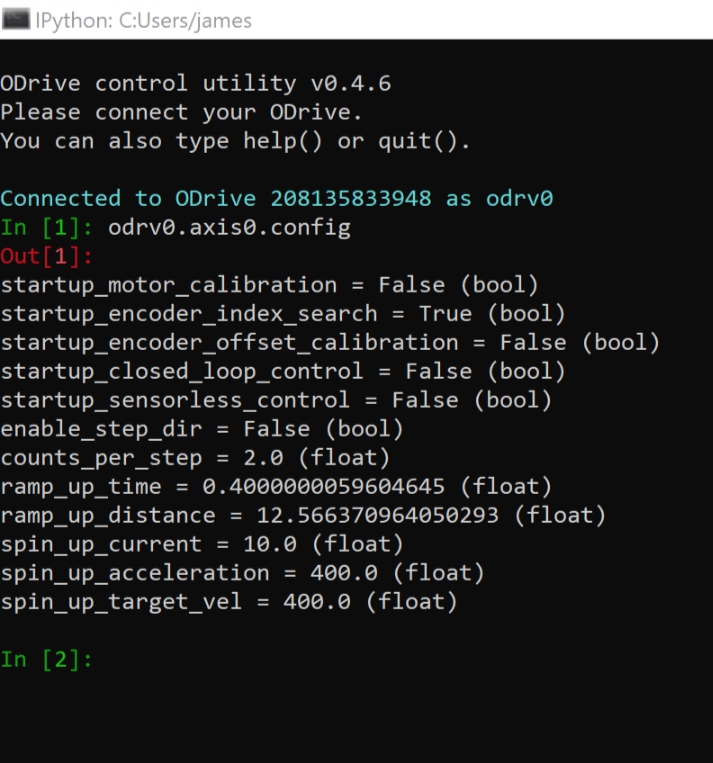
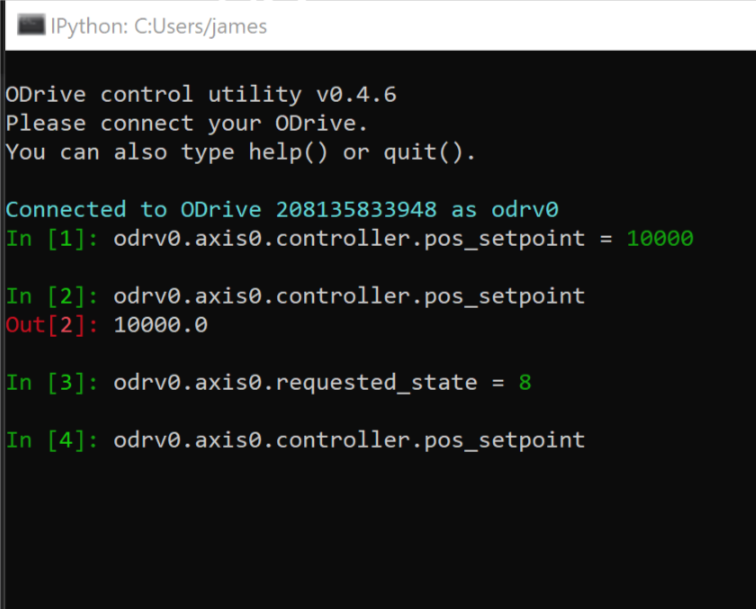
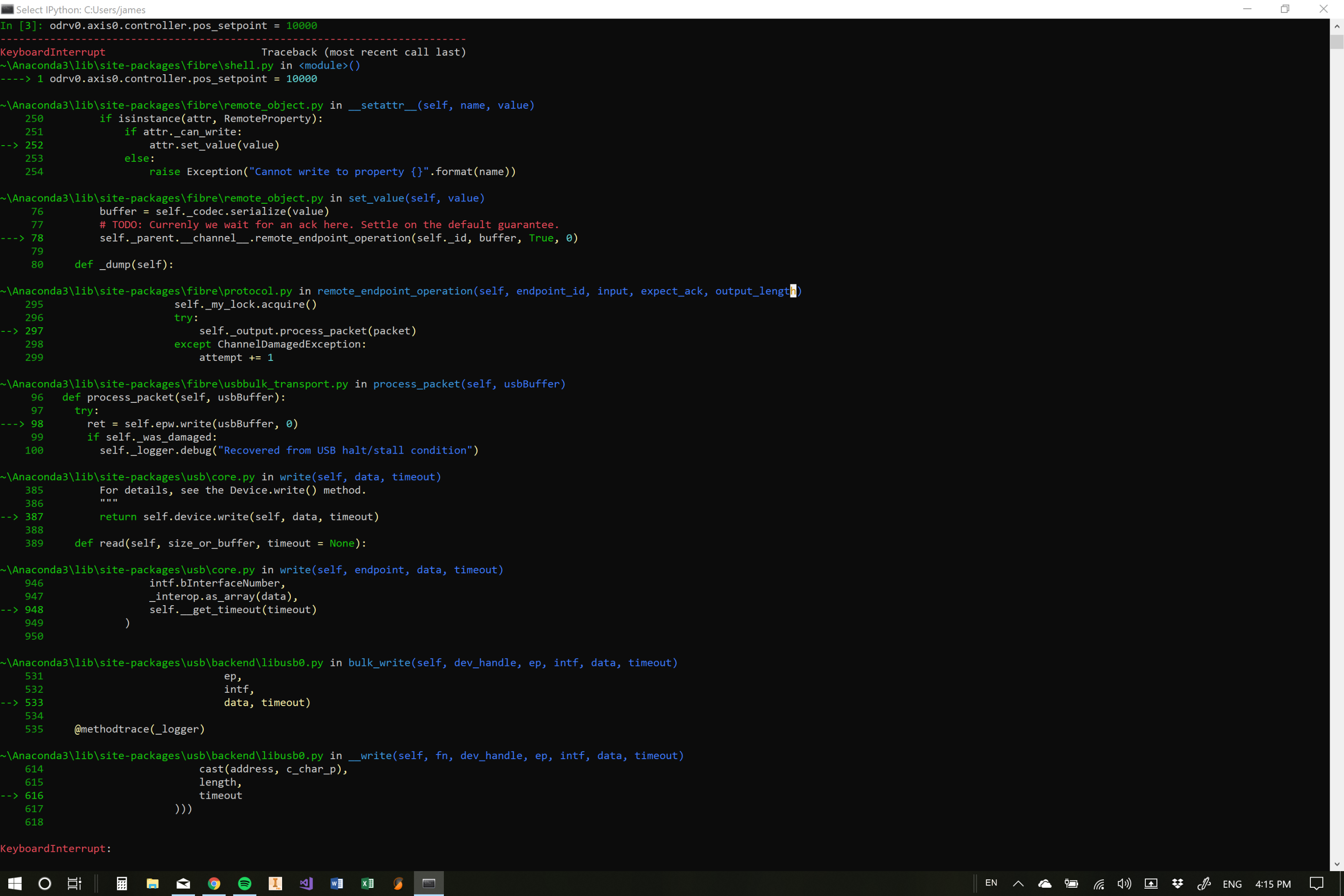
I have successfully calibrated my motor and encoder to use an index pulse through the odrivetool, but when i enter closed loop control the odrive stops responding to commands, If i change the control mode before i enter the state it changes its behaviour but if i try and change a set point for example the odrive doesn’t react or respond with any errors.
I just tried again and for some reason I was able to move the motor a couple of times before it became unresponsive again! Very strange, i didn’t change any of the physical setup or any settings.
What happens if you set the startup_closed_loop_control flag to true before enabling the axis rather than setting the requested_state separately? Do you still get the unresponsive behavior?
I’m also having this problem. I’m using the setting <axis>.config.startup_closed_loop_control = True for the race sim I’m developing. After settings this to True and rebooting, the Odrive isn’t available anymore in odrivetool.
I can use serial commands to control the position of the motors, but after a while this also becomes unresponsive. And because the odrive isn’t available in odrivetool, I can’t see any errors.
I have the same issue with the 3.6 56V version. I have updated the firmware & all drivers. Unfortunately this leaves me dead in the water, is this just a defective unit or a known issue?
I had the same issue as described in the first post. My problem ended up being solved by putting a ferrite on the usb cable. The usb cable didn’t touch the motor wires but was inside a metal enclosure with them.
Hi @Jean-Robert_Humbert, can you describe (or better, take a picture of) your setup? ODrive’s USB communication can be somewhat sensitive to grounding and other noise issues. Braiding your motor cables, using ferrite beads on the 3 wires together, properly grounding (or isolating, depending) your motor casing, etc can all have an effect on the USB performance.
Have someone tried to add a couple of TVS diodes between TP1/TP3 and TP2/TP3 pads?
A noise reduction should be pretty reliable for the usb connection at reasonable bounds, but high voltage spikes can ruin it all.