Hello,
I’ve recently purchased a couple 48V ODrives v3.5 that I would like to use to drive 1.5kW BLDC motors.
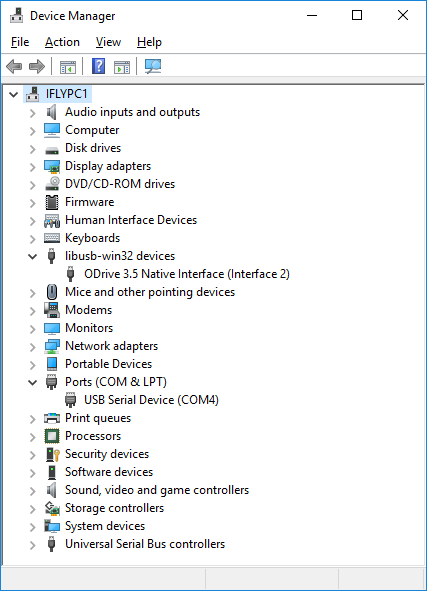
I installed everything on Windows as instructed but I can’t seem to get the motor to show up in the odrivetool. When I turn the power supply on I get the following entries in the Device Manager
libusb-win32 devices
ODrive 3.5 Native Interface (Interface 2)
Ports (COM & LPT)
USB Serial Device (COM3)
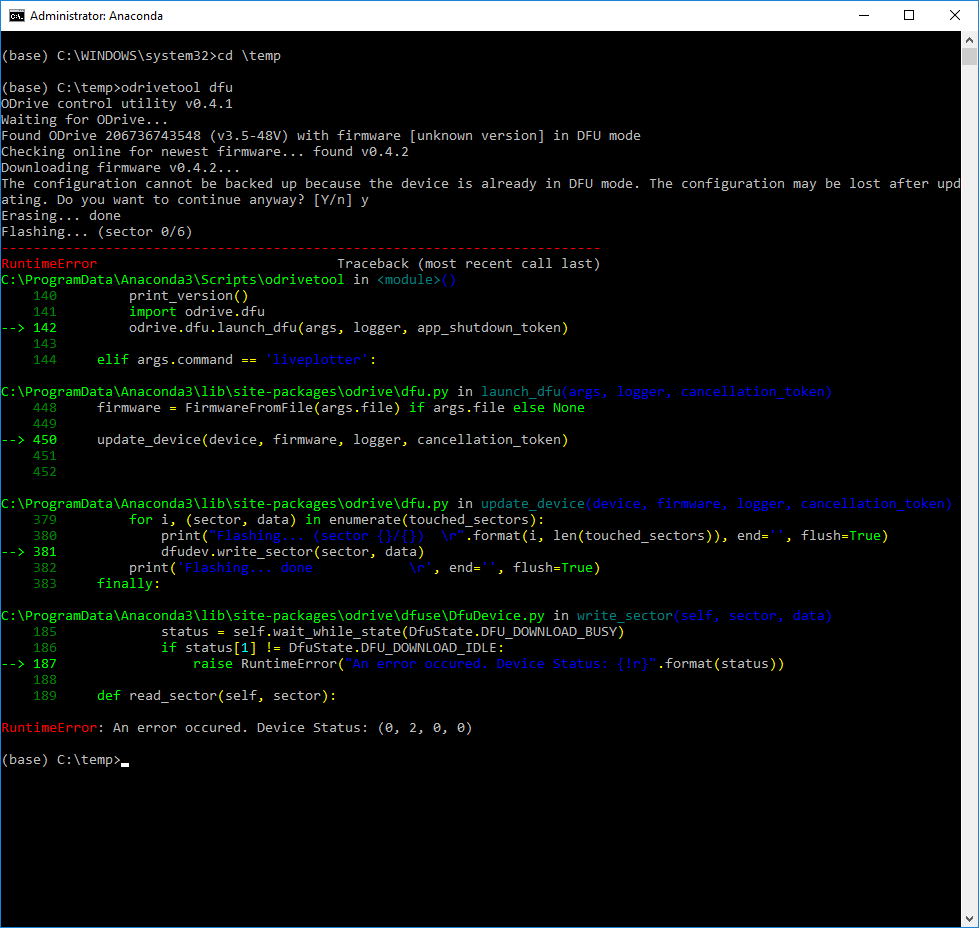
However, when I start anaconda (as administrator) and run odrivetool --verbose, I get the following
ODrive control utility v0.4.1
Waiting for ODrive...
USB discover loop
USB discover loop
ConfigurationValue 1
InterfaceNumber 2,0
EndpointAddress 3
EndpointAddress 131
Please connect your ODrive.
You can also type help() or quit().
USB device init failed. Ignoring this device. More info: Traceback (most recent call last):
File "C:\ProgramData\Anaconda3\lib\site-packages\fibre\usbbulk_transport.py", line 195, in discover_channels
bulk_device.init()
File "C:\ProgramData\Anaconda3\lib\site-packages\fibre\usbbulk_transport.py", line 54, in init
self.cfg = self.dev.get_active_configuration()
File "C:\ProgramData\Anaconda3\lib\site-packages\usb\core.py", line 875, in get_active_configuration
return self._ctx.get_active_configuration(self)
File "C:\ProgramData\Anaconda3\lib\site-packages\usb\core.py", line 102, in wrapper
return f(self, *args, **kwargs)
File "C:\ProgramData\Anaconda3\lib\site-packages\usb\core.py", line 239, in get_active_configuration
bConfigurationValue=self.backend.get_configuration(self.handle)
File "C:\ProgramData\Anaconda3\lib\site-packages\usb\backend\libusb0.py", line 510, in get_configuration
100)
File "C:\ProgramData\Anaconda3\lib\site-packages\usb\backend\libusb0.py", line 593, in ctrl_transfer
timeout
File "C:\ProgramData\Anaconda3\lib\site-packages\usb\backend\libusb0.py", line 431, in _check
raise USBError(errmsg, ret)
usb.core.USBError: [Errno None] b'libusb0-dll:err [control_msg] sending control message failed, win error: The I/O operation has been aborted because of either a thread exit or an application request.\r\n\n'
If I start the odrivetool --verbose and then turn power on, I get
ODrive control utility v0.4.1
Waiting for ODrive...
USB discover loop
Please connect your ODrive.
You can also type help() or quit().
USB discover loop
USB discover loop
USB discover loop
ConfigurationValue 1
InterfaceNumber 2,0
EndpointAddress 3
EndpointAddress 131
EndpointAddress for writing 3
EndpointAddress for reading 131
Connecting to device on USB device bus 0 device 1
In [1]:
and it sits there. Does anyone have a working 48V v3.5 on Windows 10?
Any help is appreciated.
Thanks,
Tom