I am trying to calibrate a hoverboard motor 24V 6.5inch motor following the steps on odrive page but the motor doesnt respond to the commands. ( Hoverboard motor and remote control setup guide | ODrive )
When I enter odrv0.axis0.requested_state = AXIS_STATE_MOTOR_CALIBRATION, the motor doesnt rotate but I still hear the beep sound after few seconds (2 or 3). Then with this command odrv0.axis0.motor, I get error = 0x0000 (int)
But according to some videos, the motor should rotate during calibration but in my case nothign happens and only a beep.
Following the rest of commands, I enter odrv0.axis0.requested_state = AXIS_STATE_ENCODER_HALL_POLARITY_CALIBRATION and the motor rotates and then
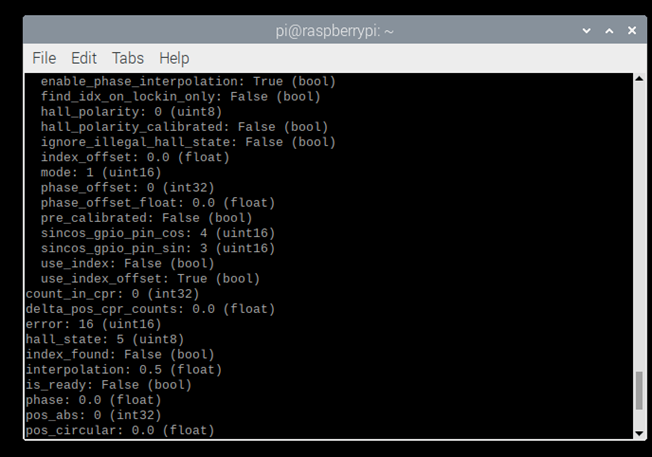
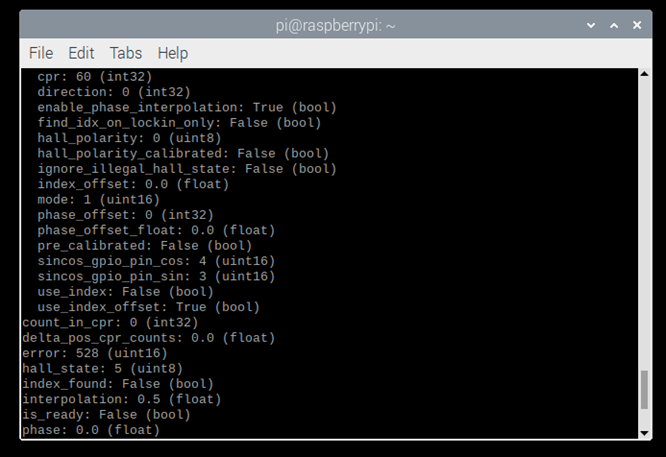
odrv0.axis0.encoder and get an error = 16 .
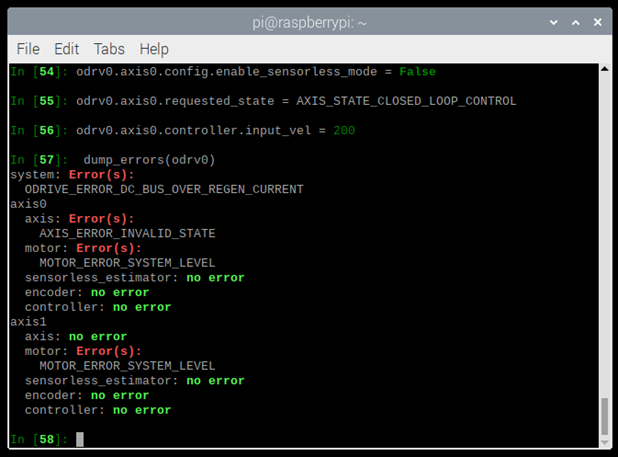
This is where I cannot get further. odrv0.axis0.controller.input_vel command doenst make it rotate.
It works in sensorless operation mode but I would need to use it will hall sensor mode.
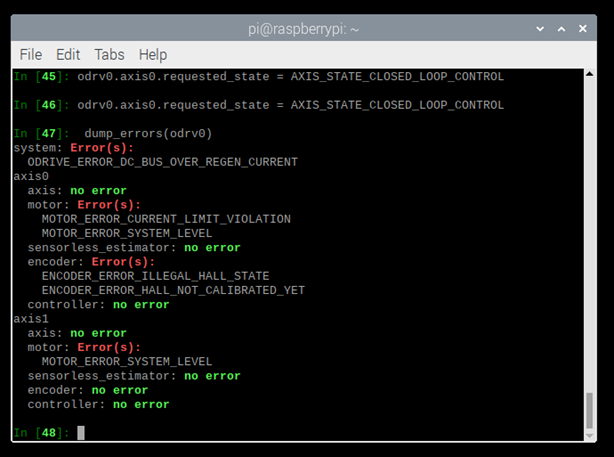
ODRIVE_ERROR_DC_BUS_OVER_REGEN_CURRENT ( gone with this )
ERROR_SYSTEM_LEVEL
ERROR_MODULATION_IS_NAN
ERROR_ILLEGAL_HALL_STATE
The motor is drawing more current that expected from the source when compared to ebike controllers . I am using a 30 V 3A adjustable power supply set at 24V for this.
I can share the screenshot next week of dump_errors if needed.
The hall sensor error can be a bit of a pain. Try setting encoder.config.hall_polarity_calibrated = True before you do the hall polarity calibration. if that doesn’t work, try encoder.config.ignore_illegal_hall_state = True. If the motor runs OK after that then you may just have wonky hall sensors or noise on the encoder pins.
I am having similar problem, the axis0 does not spin after polarity calibration. It usual return ILLEGAL_HALL_STATE. I used odrv0.clear_errors() command but still the motor doesn’t spin when in closed loop control. I am wondering if you have found a solution to this yet?
Any help would be appreciated!

{kind=link}