Hello everyone! I am trying to control two brushless motor using ODrive v3.6 .
I calibrated and configured the motors for velocity control using PWM signal. I am using gpio 3 and 4 for that. If i control only single motor or using only one gpio, motor works just fine. But when i try to run them both at the same time motors “AXIS_STATE_CLOSED_LOOP_CONTROL” is set to “False” or motors gives error 16
What could be the problem?
Is it related to exceeding current range?
How do I solve this issue?
What is the output of dump_errors?
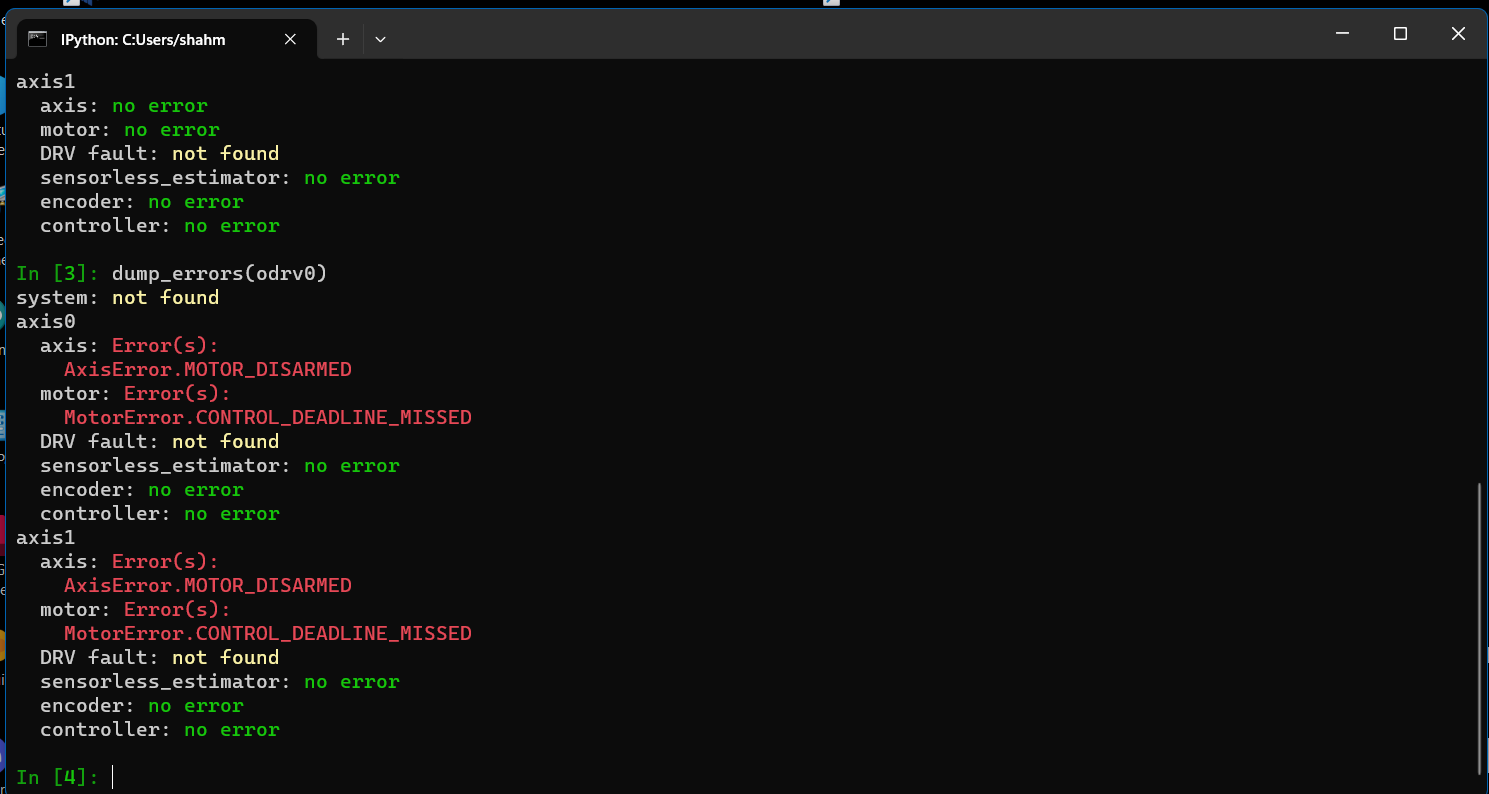
Yeah, that basically means that the loop is too slow for both motors. Are you using INPUT_MODE_TRAP_TRAJ?
You can try simpler input modes. You can also share some more information. Encoder type, motor type, firmware version.
No, I am not using INPUT_MODE_TRAP_TRAJ.