
Hello, Levino,
i am not from support, but i can advise you to be more friendly here in the forum!
Say who you are, what you want to build, what you have already tried to solve the problem…
For example, have you already worked through the instructions?
On the fast side it looks like you haven’t configured the encoder correctly yet.
I published a spreadsheet a few weeks ago that can help you better understand the configuration commands:
https://discourse.odriverobotics.com/t/6dof-motion-platform-using-odrive/1629/84?u=wickie
Wickie
Translated with www.DeepL.com/Translator
Hello ! thanks for the tip and i also apologize to everyone if i was incovinient really think it was the anxiety of making it happen
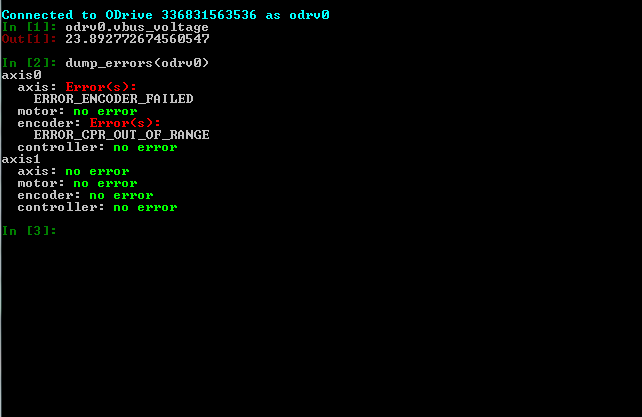
I notice these errors and I can not go ahead already read all documentation but I can not where I am going wrong?
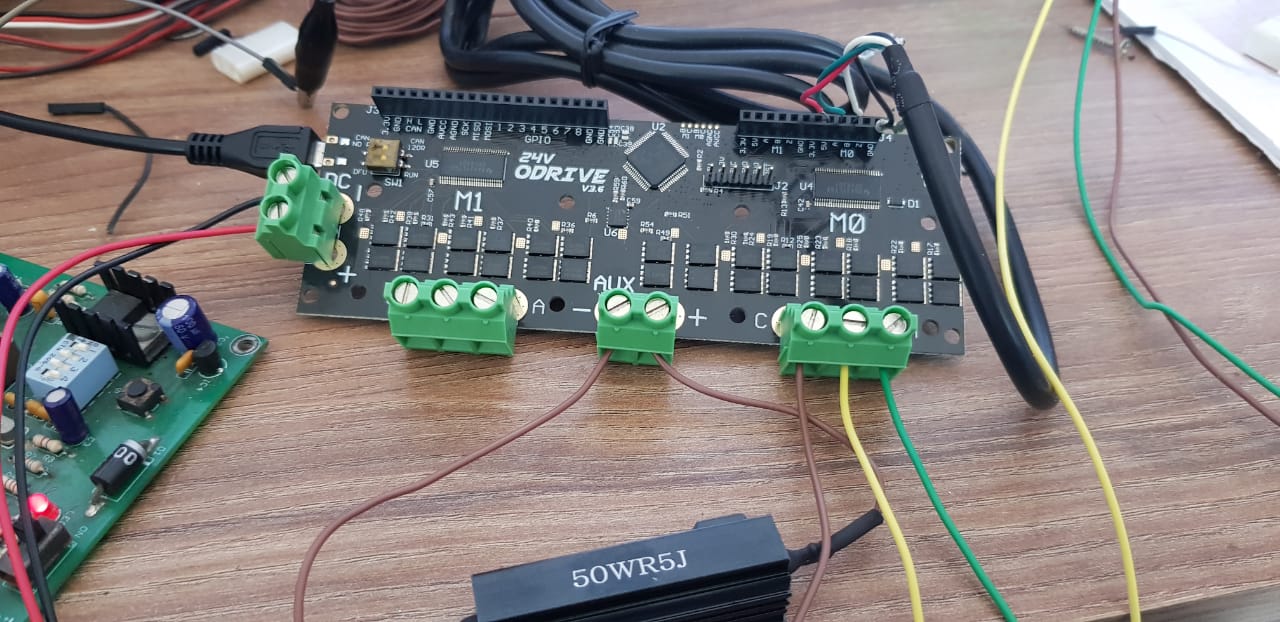
Hello ! I believe I made all the correct connection between odrive and motors and encoder but I have a project that I need to send the pwm from another coiler to odrive already done almost everything and I can not have success can someone help me my odrive and version 3.6 already follow all documentation 10 times I can’t
Hello everyone ! I would like to know what is missing to achieve
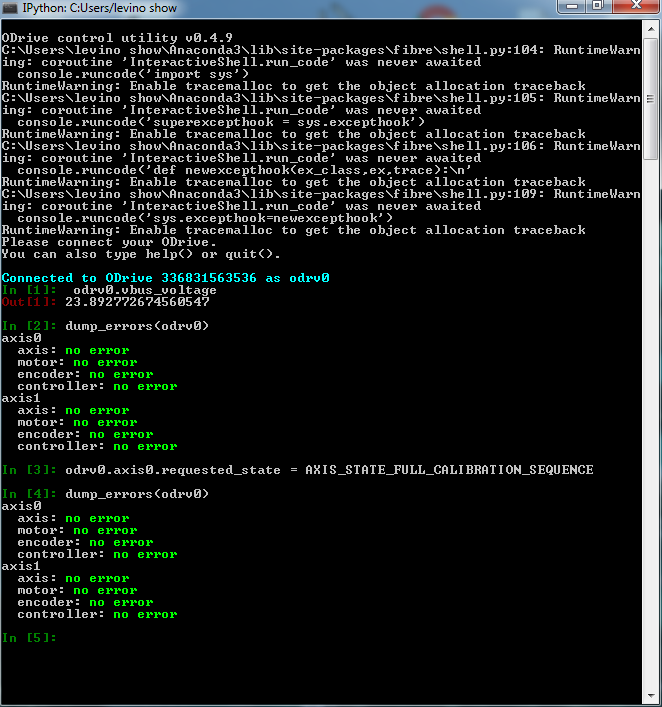
1° odrive calibrated without errors
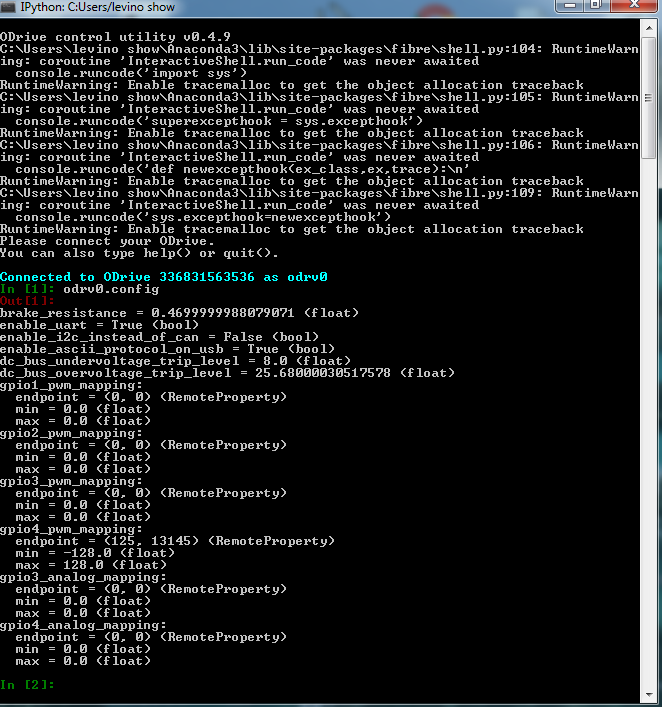
2° odrv0.config

mapping gpio4
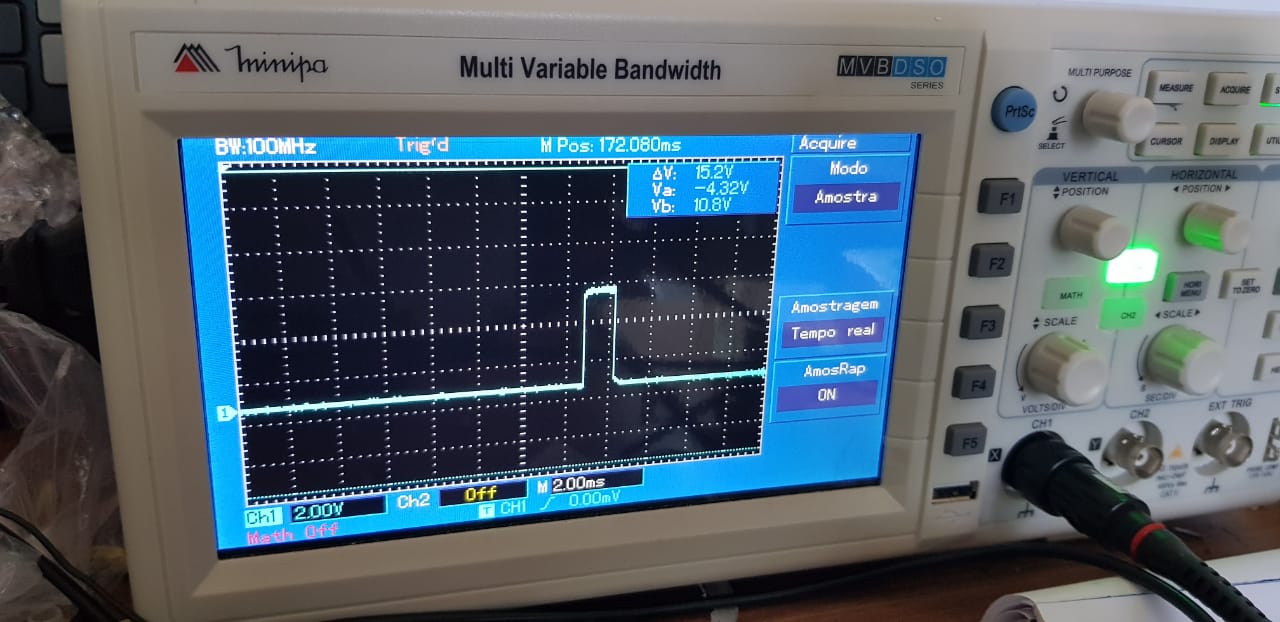
I want to control this displacement motor and position with the pwm that comes from this board
gnd on pwm signal on gpio4
measure on oscilloscope the pwm signal is OK
but I can’t make the engine move
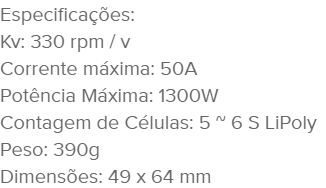
motor
Motor Brushless Keda 49-64 330kv
encoder

Encoder Rotativo Incremental 600 Pulsos/volta Eixo 6mm 5-24v
I’ve read the documentation several times but unfortunately I’m not able to advance I ask for help
could it be the frequency of pwm?
Have you worked through the basic steps, or dived straight into trying to control by PWM? For example, have you actually performed every step in “Getting Started”, have you successfully perfomed “Position control of M0” in the documentation and got the motor to move, or just skipped past the basics and went straight to PWM control? Have you done any configuration in the ODrive parameters? All you’ve shown in ODrivetool is reading the vbus_voltage, a dump of the errors and requested full calibration sequence. If that’s your first and only typing into ODrivetool, then you haven’t read and followed through the documentation and if you won’t follow the basic steps then any help is futile.
You need to be more specific with your questioning, just broadly ask for help without pin pointing your particular problem isn’t going to get you very far. I can’t help feeling reading your posts that you haven’t worked through the documentation and actually performed the steps.
Hello ! friend I believe I read all the documentation but I can not understand because I can calibrate more I can not activate so I came to the forum for continuity so I posted to where I had arrived thanks for your help more sorry to help me with the steps like I do ! because I read the documentation and can’t
From what I tested I believe that the option of pwm is not configured by the gpio! How do I know if the configuration is wrong?
What control mode is the ODrive in, position or velocity?
Did you try sending velocity setpoints in odrivetool? Did the motor move?
Hello everyone ! i’m new here i have odrive and i’m not able to activate the pwm control in gpio4 if all the doc.documentacao the engine is calibrated but does not respond to the pwm pulse that comes from another controller! this feature is active I have ODRIVE v3.6 ALL HELP AND WELCOME since thank you
{sorted out} to control both position and speed
madcowswe I think I read all the documentation but I don’t have a good knowledge of python yet could you give me the steps I have to do so that I can succeed in the calibration and pwm function
You’re not answering anyone who is trying to help
thank you all !
the configuration that worked for me was this below if someone is looking for the same configuration
odrv0.erase_configuration()
odrv0.reboot()
odrv0.axis0.encoder.config.cpr = 2400
watermelon credits !!:sorrindo::sorrindo::sorrindo:
odrv0.axis0.config.startup_motor_calibration = True
odrv0.axis0.config.startup_encoder_offset_calibration = True
odrv0.axis0.config.startup_closed_loop_control = True
odrv0.save_configuration()
odrv0.reboot()
odrv0.config.gpio4_pwm_mapping.min = -1500
odrv0.config.gpio4_pwm_mapping.max = 1500
odrv0.config.gpio4_pwm_mapping.endpoint = odrv0.axis0.controller._remote_attributes[‘pos_setpoint’]
odrv0.save_configuration()
odrv0.reboot()
odrv0.axis0.current_state