Hi Oscar and everyone!
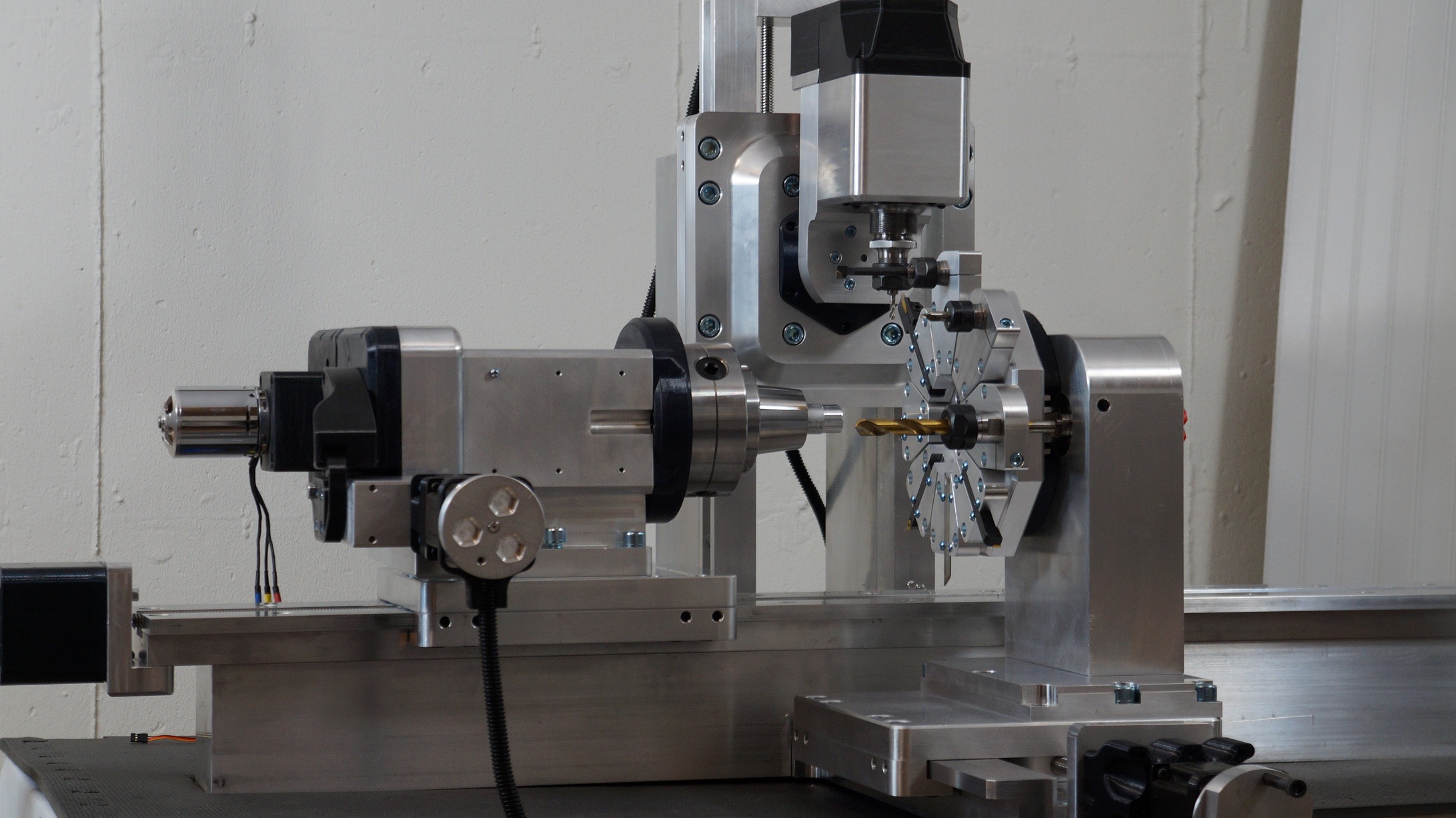
I’ve been stalking you all since early 2016. Prior to that I thought I would have to make my own closed loop BLDC controller, but then I found ODrive, so I scrapped what I had on the electrical side and focused on the mechanical stuff. Long story short, this project is the version 2 prototype swiss mill turn center.
If you’re unfamiliar with the concept, just youtube some videos of swiss cnc lathes and mill turn centers.
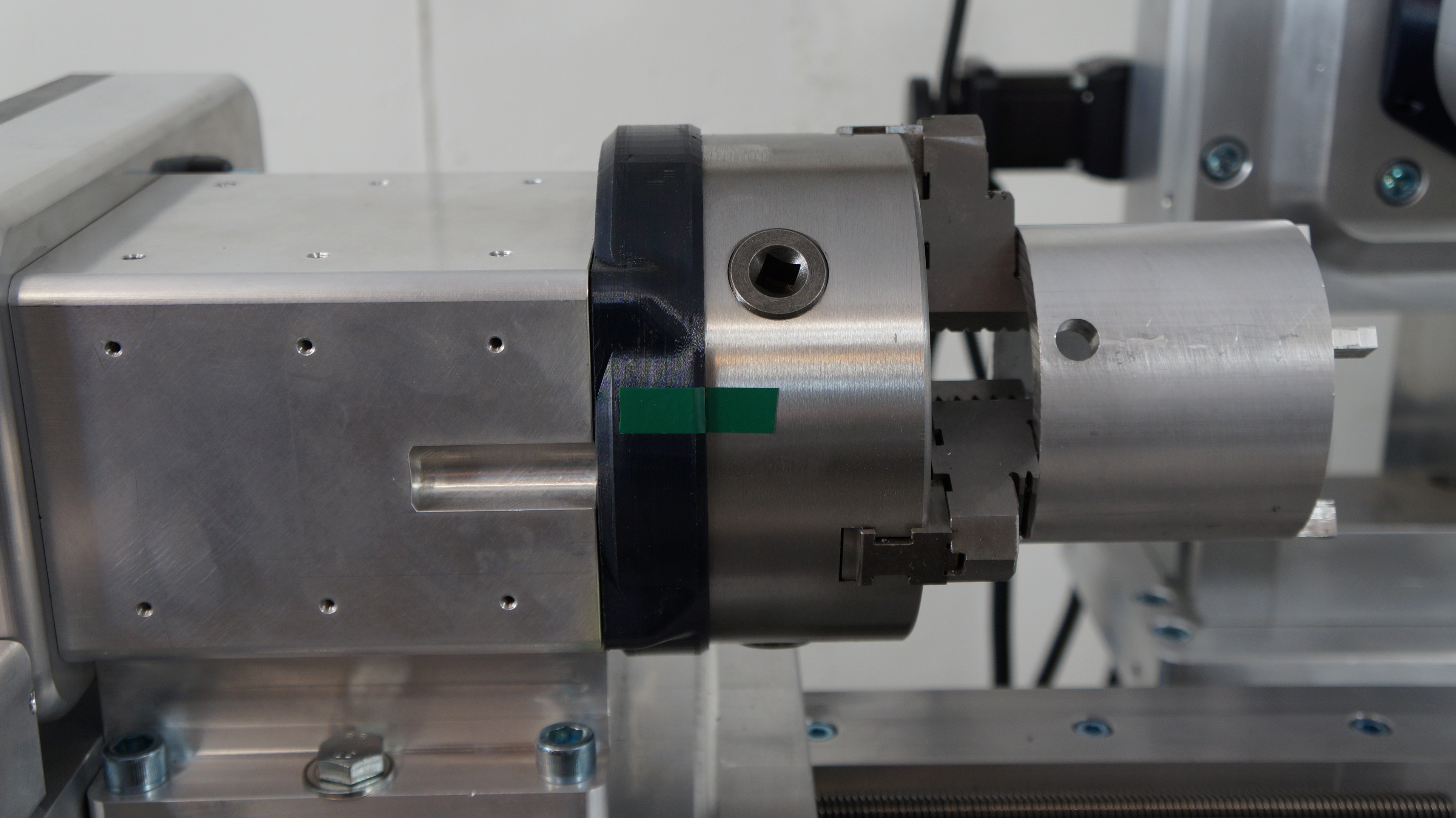
The reason I’m posting now is because I’ll be launching a kickstarter for this machine fairly soon, but I don’t yet have all the information I need about the ODrive and what I can expect. Right now the machine uses dual shaft steppers, with the spindles being powered by 63mm outrunners. I planned on integrating this machine with the ODrive controller from the beginning, so the motor shafts are 8mm to fit the CUI AMT series encoders.
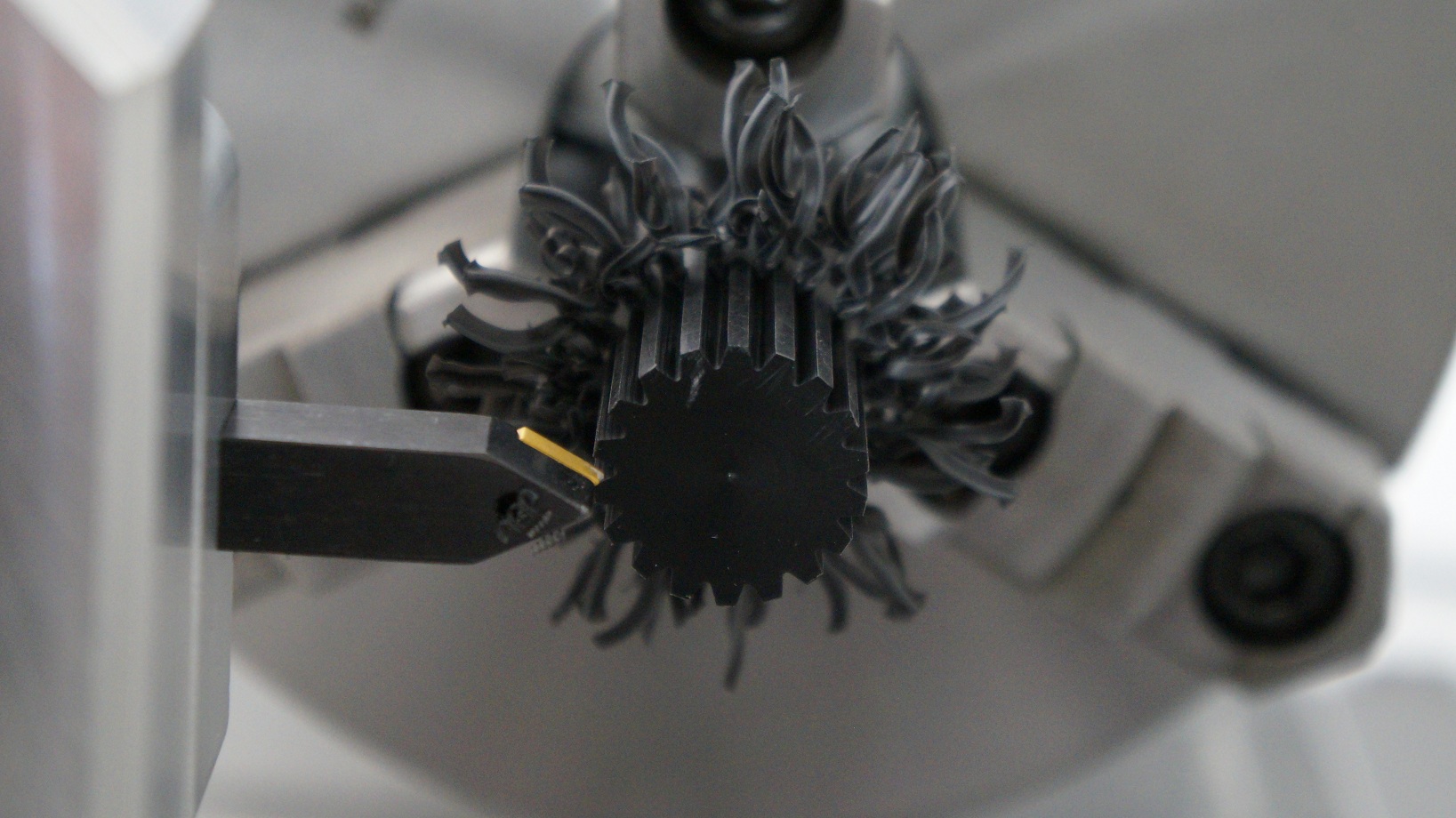
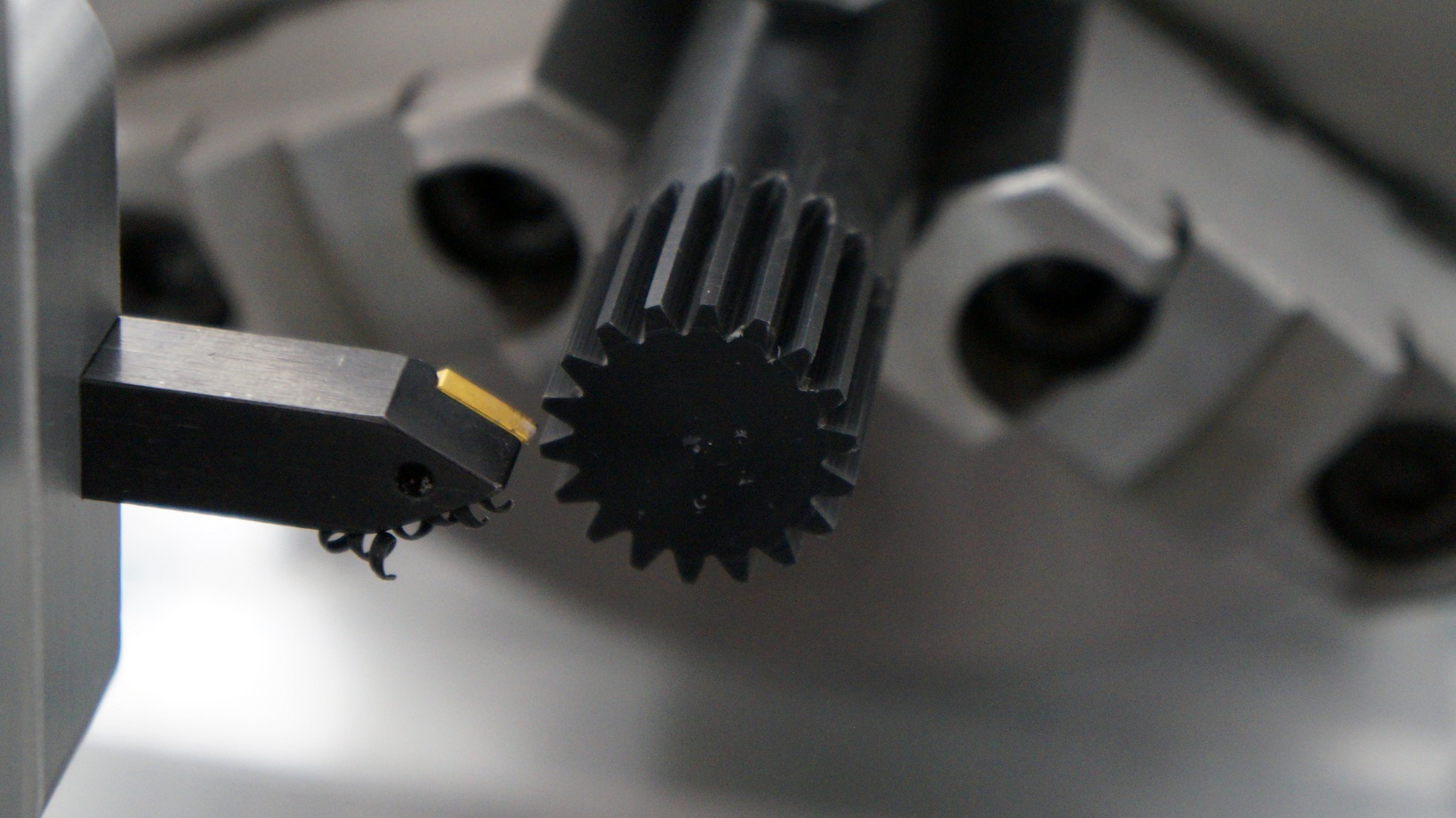
The ultimate goal is to have the machine capable of running O-Driven motors on all axes, especially the spindles, which will give it the same capability as the full sized industrial machines. Rigid tapping, spindle orientation, and synchronized skiving / hobbing (for gears) are attainable with the ODrive. The positioning axes would also benefit from slightly improved resolution, but speed and linear thrust would be greatly increased. Steppers can’t rotate the B axis mill head and C axis workpiece fast enough for most simultaneous 5 axis machining operations.
Sadly my machine doesn’t have an O Drive right now. I was a couple clicks away from buying one in late November, but then v3.3 sold out and I couldn’t wait until the end of December. Also there is no bootloader yet (I think?) and I didn’t want to gamble on my ability to flash firmware with 3rd party linux software.
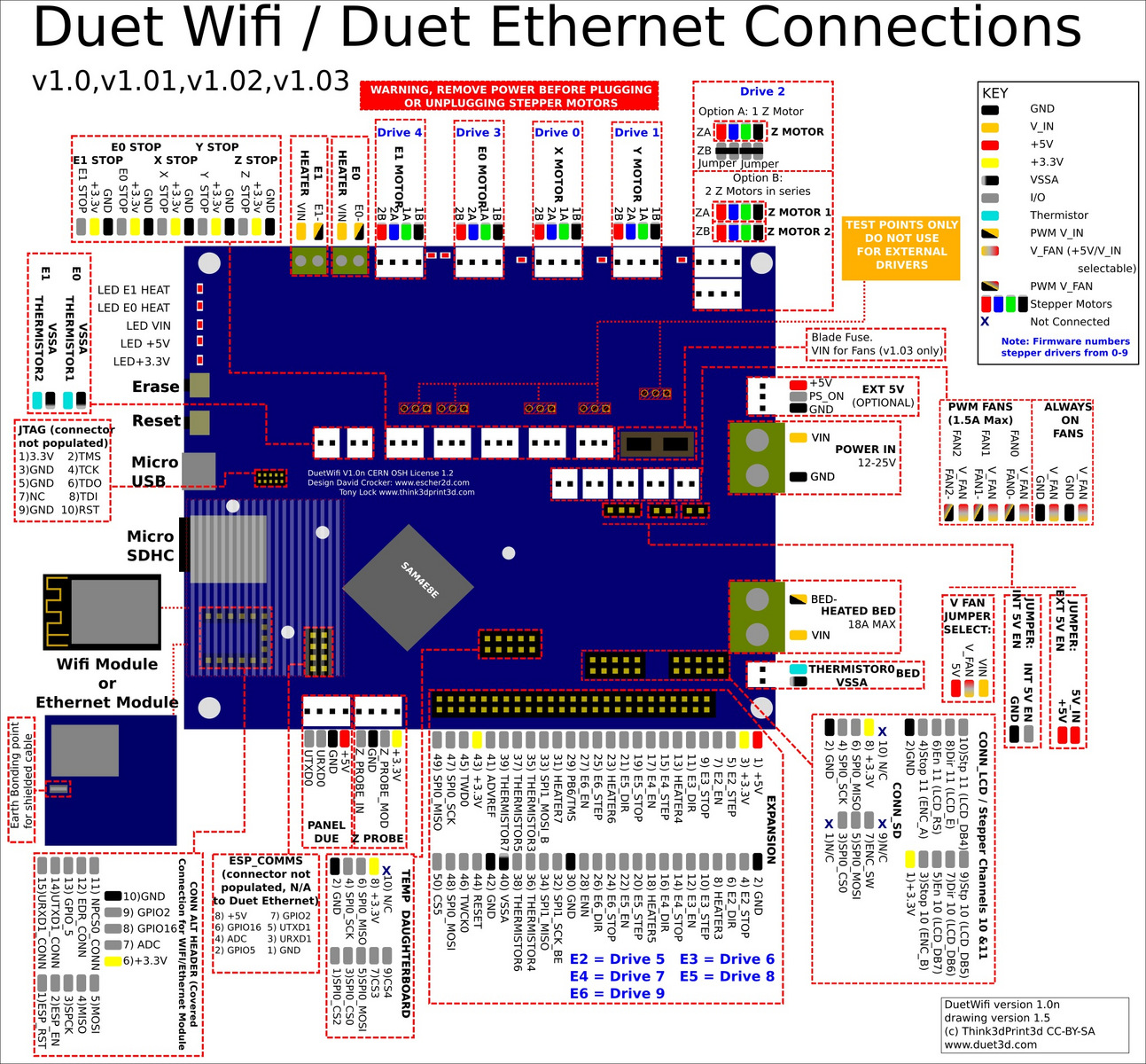
The plan is to use 1 or more O Drive controller[s] (48v) that take commands from some type of 3d printer controller (smoothieboard, azteeg, duet, ect) and send data back that can be displayed on a touch screen. Right now I have to use a VESC to control the spindle motors because ODrive doesn’t have the communications and the IO stuff isn’t quite where I need it to be. But I know it will get there soon enough, so it’s my top choice.
I can only upload one picture since I’m new on this forum, I’ll get a bunch more in subsequent posts.
Can’t wait to get it working with an ODrive!
Check out this forum thread for more pictures;
http://forum.seemecnc.com/viewtopic.php?f=41&p=107454&sid=275fde61fc97b559758bc7809c3109c6#p107454