I am using an ODrive Pro with a CubeMars AKE60-8 motor under pass-through control using an Arduino script to prescribe a sinusoidal torque profile oscillating between 0 and a variable max torque (T_max) with period 1s < T < 10s.
Motor Specs: https://www.cubemars.com/product/ake60-8-kv80-quasi-direct-drive-actuator.html
Peak Current: 12 A
Peak Torque: 1.56 Nm (excluding the built-in 8:1 planetary gearbox)
Kv = 80 rpm/V
Kt = 0.125 Nm/A
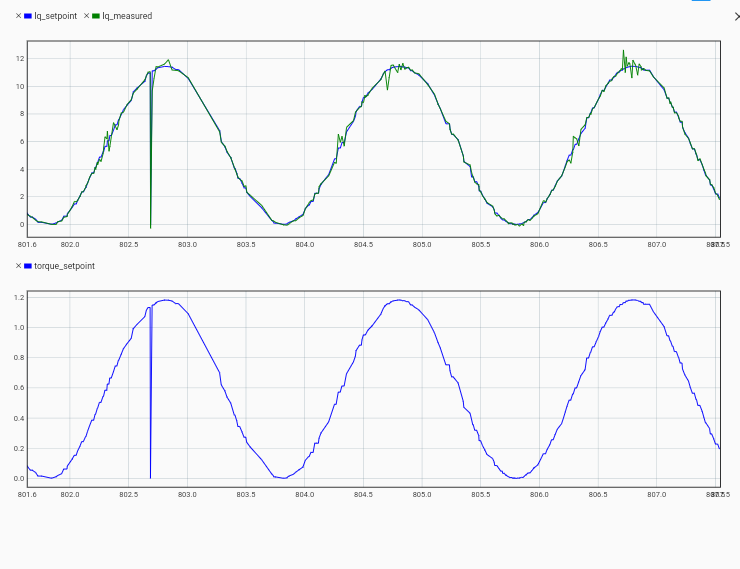
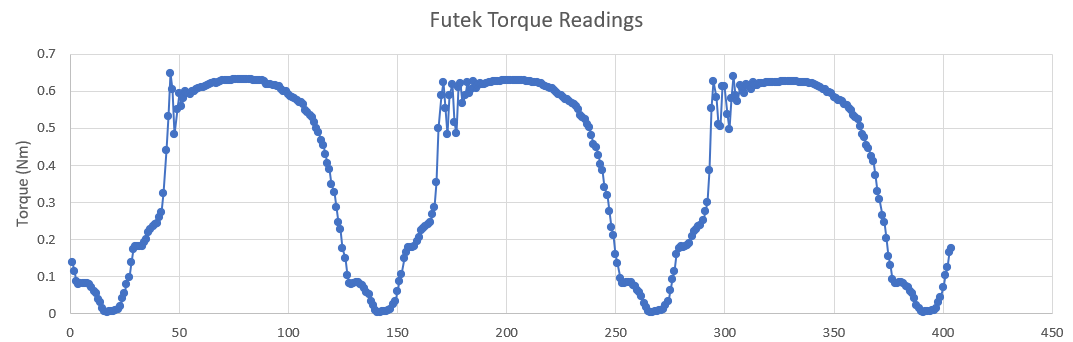
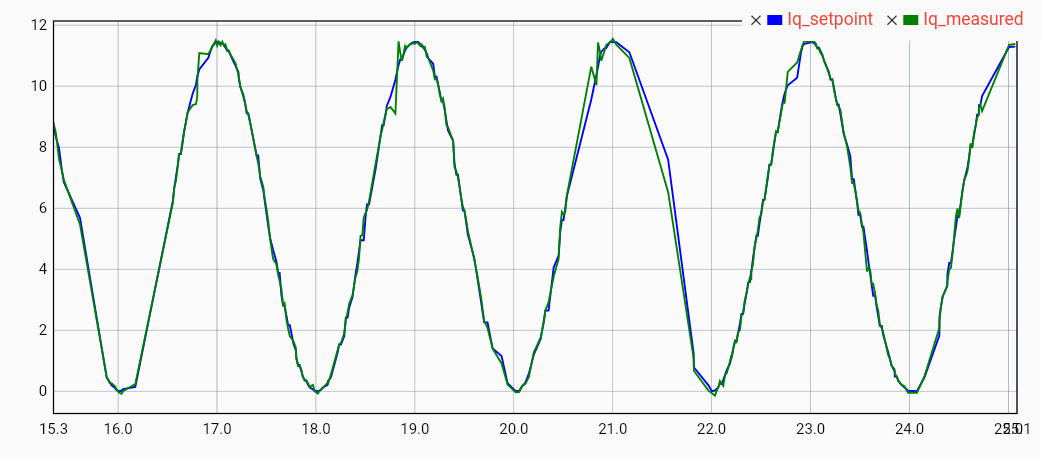
I am using the ODrive GUI to display the measured and setpoint currents (Iq_measured and Iq_setpoint), as well as estimated and measured torques, while simultaneously measuring the output torque using an external Futek torque sensor. All testing is performed in a quasi-static state, with very low motor speeds.
While the theoretical torque (T = Kt * I) calculated from the measured current maps very well to the torque measured using the Futek sensor up to about 7-8A of motor current, requesting torques any higher than that exhibits a very steep and nonlinear increase in current draw. The motor output torque is maxing out around 1 Nm (65% of peak rated torque). Any torque requests to the motor higher than produce an Iq_measured current peaking just below the rated peak current of 12A, which is also the max current setting used for the ODrive configuration.
I have made sure to disable the enable_torque_mode_vel_limit and it makes no difference in the measured current reading or resulting torque measurements.