Hi Noodles, sorry, I just spotted your post, I’ve been so busy with the project and working my day job.
Thank you, it’s coming along nicely.
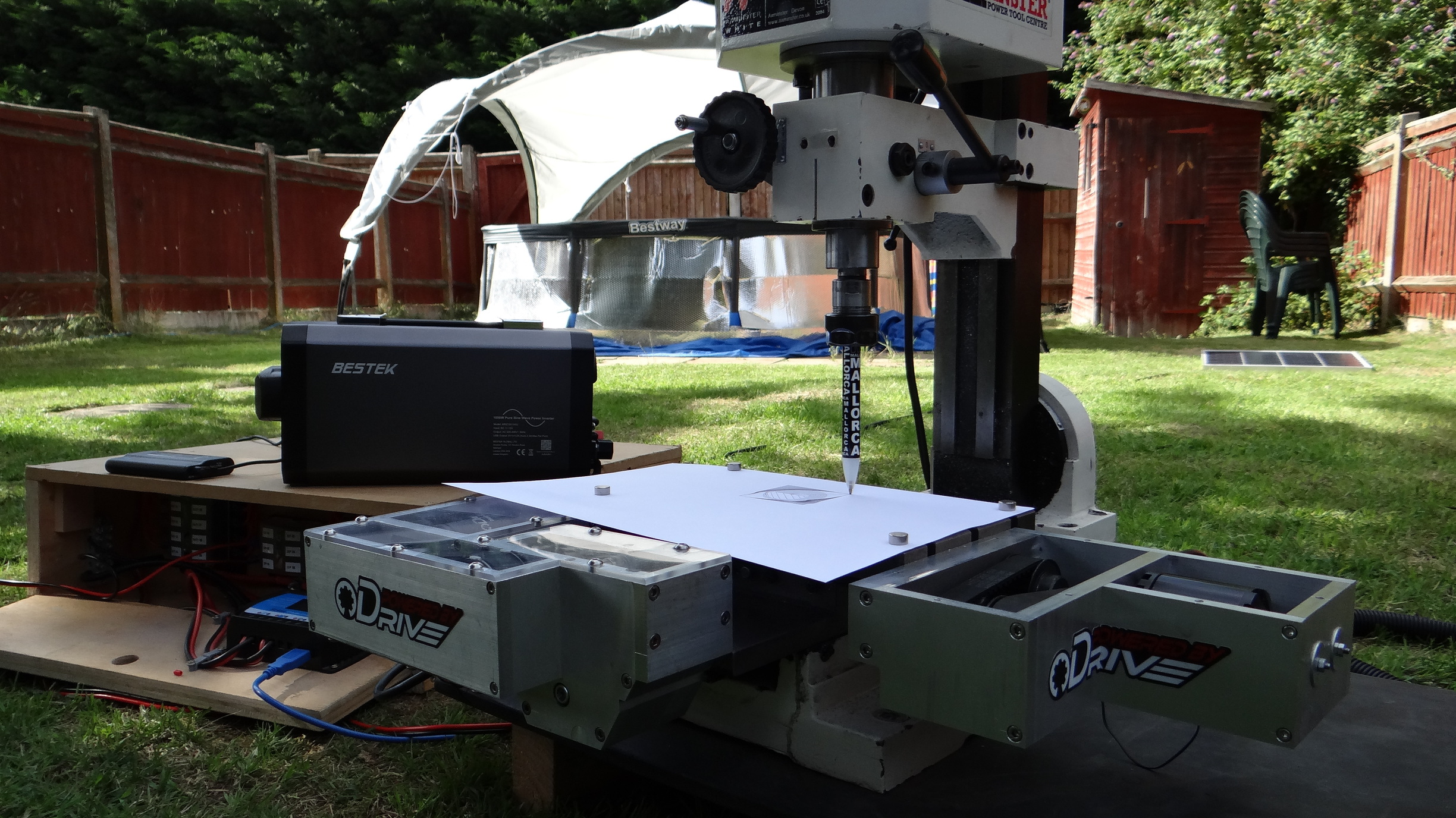
I haven’t had any issues with noise at all, everything works very well even with the standard lead that comes with the encoder running next to the motor lines for 50cm and with the motor current set to 60A. This is running on 12v lead-acid batteries; I believe most people have issues with power supplies, where ripple noise could come from that or don’t have a very solid mount for the AMT102. Even when I knock my drive unit fairly hard, there is no movement from the motor.
You could try adding a large capacitor close to the ODrive power input, or better still have a lead-acid battery connected as a reservoir then the PSU output would be smoothed out and just keeps the battery topped up. I would recommend a cheap wheelchair battery and set the PSU to 12.8v (float charge).
I hope that helps








 .
.