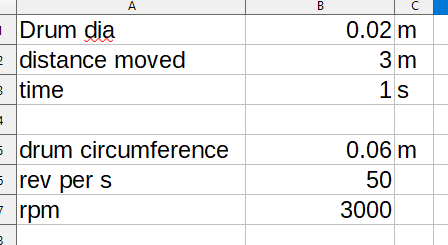
Hi Max,
That’s a very small drum. Are you sure it’s 2cm diameter? How many layers of rope does it have when fully coiled?
For the force you need, are you saying that you need 10 Nm at 1cm i.e. you need 1000N (100kg) force?
But in any case, if the motor needs to move at 3000rpm, that’s 30V back-EMF with a kv100 motor. So you will need the 56V ODrive, but it will be fine.
Even if you had a lower Kv (i.e. high EMF) motor, or less than 30 power supply volts, the effect would be to force the ODrive to dump some power into the battery and/or brake resistor when the motor’s EMF is higher than the supply voltage. Because of this current, the motor would produce some extra resistance torque at the highest speed, and it would force you to take slightly longer than 1s to lift the bar.
The tricky part is finding a motor that can produce enough torque, doesn’t produce much more than 60V back-EMF at 3krpm, and is cheap.
That “mige” servo motor is no good, because it’s back-EMF constant is much too high. 140V/krpm means 420V at 3000rpm (Kv = 7, to put it into hobbyist terms). It’s designed for 220V applications, but it can’t actually reach 3000rpm even with a 220V supply.
Also, you don’t want to be driving a motor close to its max current / torque, because it will be extremely inefficient. Remember that torque scales linearly with current, but the cost in Watts due to resistive losses go with the square. The winding resistance also increases slightly as the motor heats up. Normally industrial servomotors have a “peak” current or torque rating about 2-5 times higher than their continuous rating. A ‘hobby’ motor usually only quotes the peak rating.
Does it have to be direct-drive, or can you use some mechanical reduction such as a toothed belt? If you can have some gearing, then a smaller version of the one suggested by dekutree earlier might be ideal. Or, if cost is less of an issue, there are companies like t-motor who will sell you a 10Nm planetary-geared actuator for about US$500.
If it does have to be direct-drive, if it weren’t for the issue of how to fit a proper encoder, I still think e-bike motors would be your best bet. With a 50Nm motor you could use a larger diameter spool, which I think would make things easier for you mechanically.
Or on the subject of e-bike motors, perhaps a ‘mid-drive’ e-bike motor might be a good one? These are designed to mount to the chain sprocket, and have a huge torque capacity via a gearbox. It’s also probably much easier to mount a proper encoder to one of these than a hub motor, i’d guess…