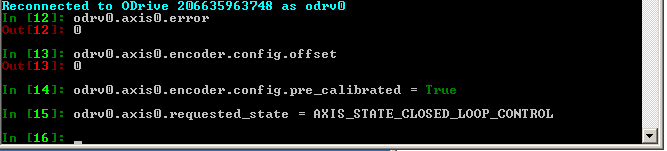
looks so my odrive lacks power. I get some weird errors.
I get turning off the motor with an error 20 if current_limit more than 10.0f.
Turning off occurs when I trying to apply a force and rotate the motor from set position
It happend with Magic Pie and N5060
Probably somewhere there is a loss of current. How can this be verified?
-------- Magic Pie --------
Here is the video where the motor turns off after a while if i apply a force with error 20 (20A, 2500 ppr encoder .use_index=true) https://youtu.be/EwSUimDZ7oc
Here is the video where the motor turns off almost immediately with error 20 (10A, 2500 ppr encoder .use_index=false) https://youtu.be/PVnwPBquiEU
Here is the video where cur_lim =2.0f and everythig is ok, no errors, the motor doesn’t turns off https://youtu.be/WqJm22GtKGA (2A,2500 ppr, use_index=true)
I can rotate motor as i wish, but if i send SetParameter(…,20f) then it will turn off if i apply a force
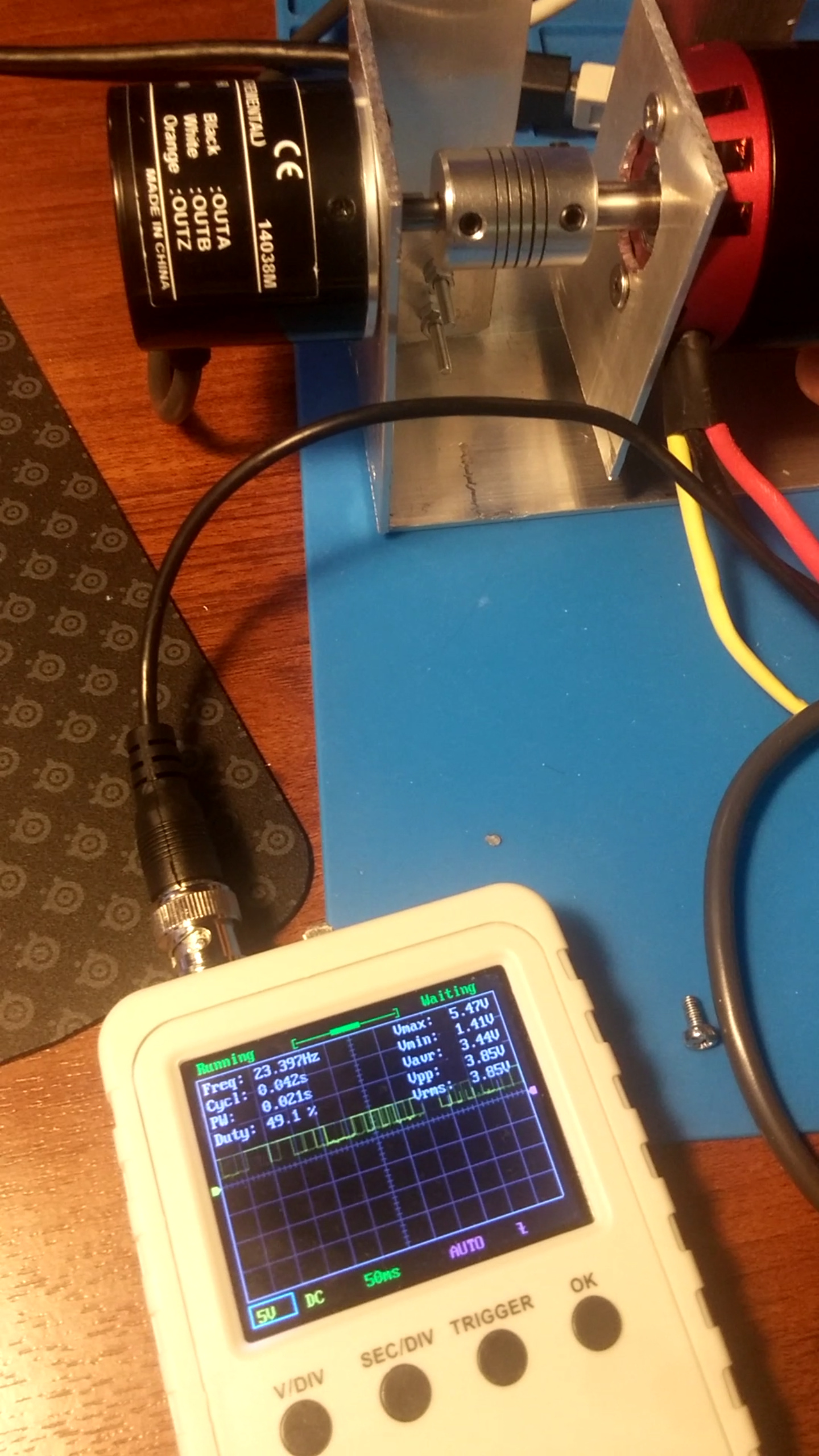
Here is the video i made with oscilloscope connected to the bus voltage https://youtu.be/zjvwrl-6fCU
Bus voltage stays about 48 V (20A, default encoder 600 cpr)
Pulleys ratio always 1:9.75
-------- n5060 --------
This also happens with n5060 when cur_lim = 30f, here is the video https://youtu.be/oo6D2SFX8CY (n5060, default encoder 600 cpr, 30A)
In generally, what does mean error 20?
---- My settings in low_level.c:----
.pole_pairs = 28
.resistance_calib_max_voltage = 4.0f
.current_lim = 02.0f - 30.0f
.encoder_cpr = 5850 * 4 for default 600 cpr encoder
.encoder_cpr = 24375 * 4 for 2500 ppr encoder
.use_index=false or true
Сould you tell please how can i check Z index encoder by osciloscope?
Sometimes i get this https://youtu.be/QVcy4Hxtdj8 strange behavour when
.use_index =true, .manually_calibrated = true,
Looks like encoder cant find z pulse, but usually all is normal.
I still doing varios tests… If something clears up, I’ll write more accurately