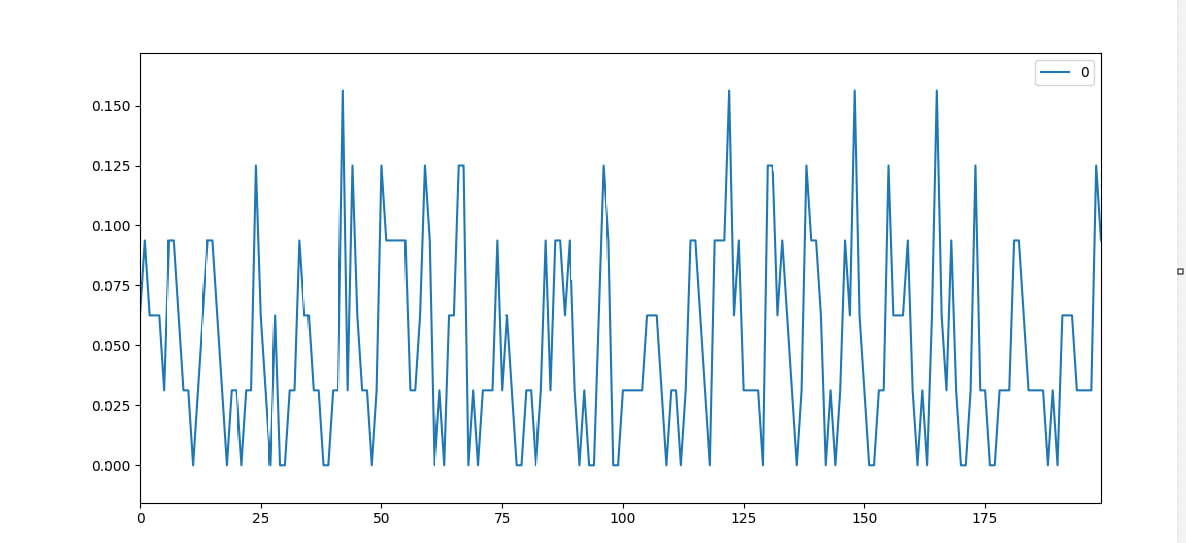
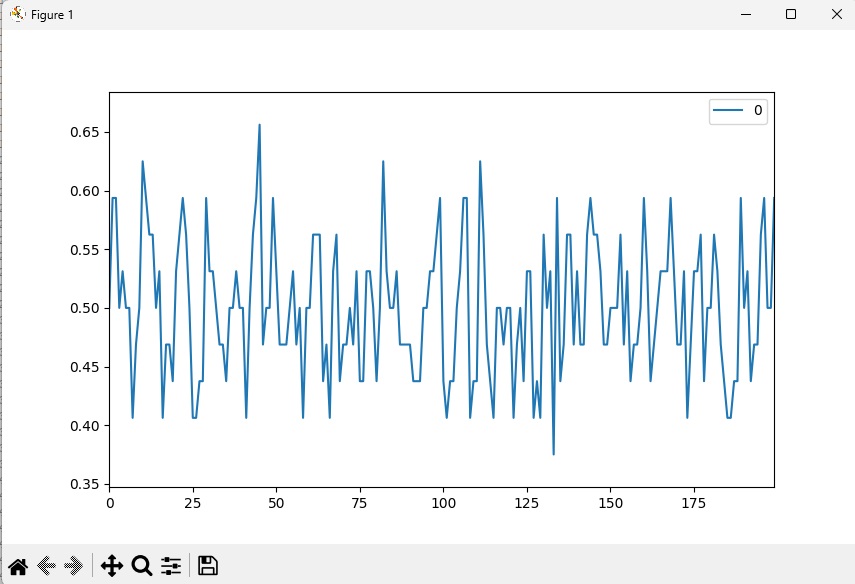
I’ve tried different PI gains - configured with official setup instructions and some experimental values, in general it hasn’t changed the behaviour a lot. I’ve noticed that there are also ibstability on higher rpm:
This could be a great suggestion, because my mechanical setup is not perfect… I’ll try to place the sensor ideally regarding the magnet and check if something’ll change.
I’ve rebuilt the mechanical setup, so encoder is now placed with no offsets, but unfortunately nothing changed at all… Here is my commands sequence, maybe something is missing?
Maybe this observation can give any additional info: when I set encoder.config.cpr to 4095 it stops working, so the cpr value need to be lowered in order to get it rotating at least somehow.
Oh - yeah so of course it’ll stop working at 4095, since that’s the wrong value. 4000 is correct for ABI.
Gimbal mode is a bit problematic at higher RPM - you can try enabling R_wL_FF_enable and bEMF_FF_enable, though those require accurate phase inductance/resistance and motor KV measurements.
Can you show your entire setup procedure, all the commands you use to configure the ODrive? Or is it just the lines you showed above?
I think this is due to the cogging torque in your gimbal motor - if you can switch the AS5047P over to using SPI so that it’s an absolute encoder, you could try anticogging.