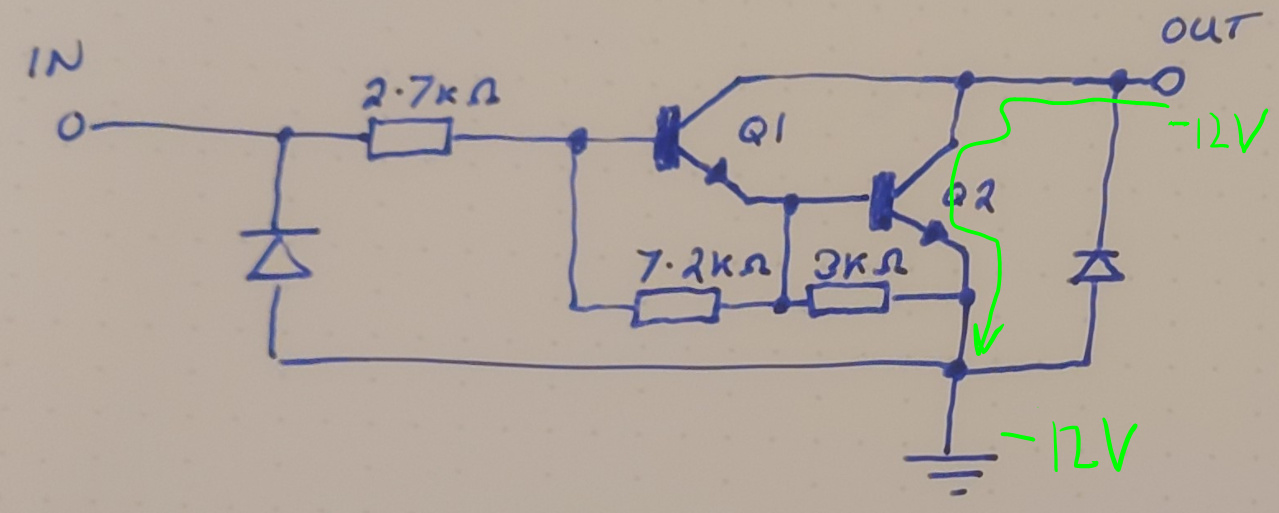
ULN2003A Darlington pair array…
Bear with me…
I love using these for protection in many circuits and have used them for all manor of things including converting RS232 to higher voltage (12v) RS485 for distant CCTV applications (PELCO D protocol works well), small DC motor drivers, Stepper drivers, etc, etc. Where you can parallel all of the 7 internal drivers for a max of 3.5A. Plus they are a cheap (£0.42) frangible component (although doesn’t offer full electrical isolation like an Opto-Isolator, but does offer a good degree of protection and can handle high speed serial such as 115200 bps).
The ULN2003A’s can handle up to 30v on their input pins, sink 50v on the outputs, have suppression diodes on both input and output and are fast switching (max 1µs both rise and fall (0.25µs typical)).
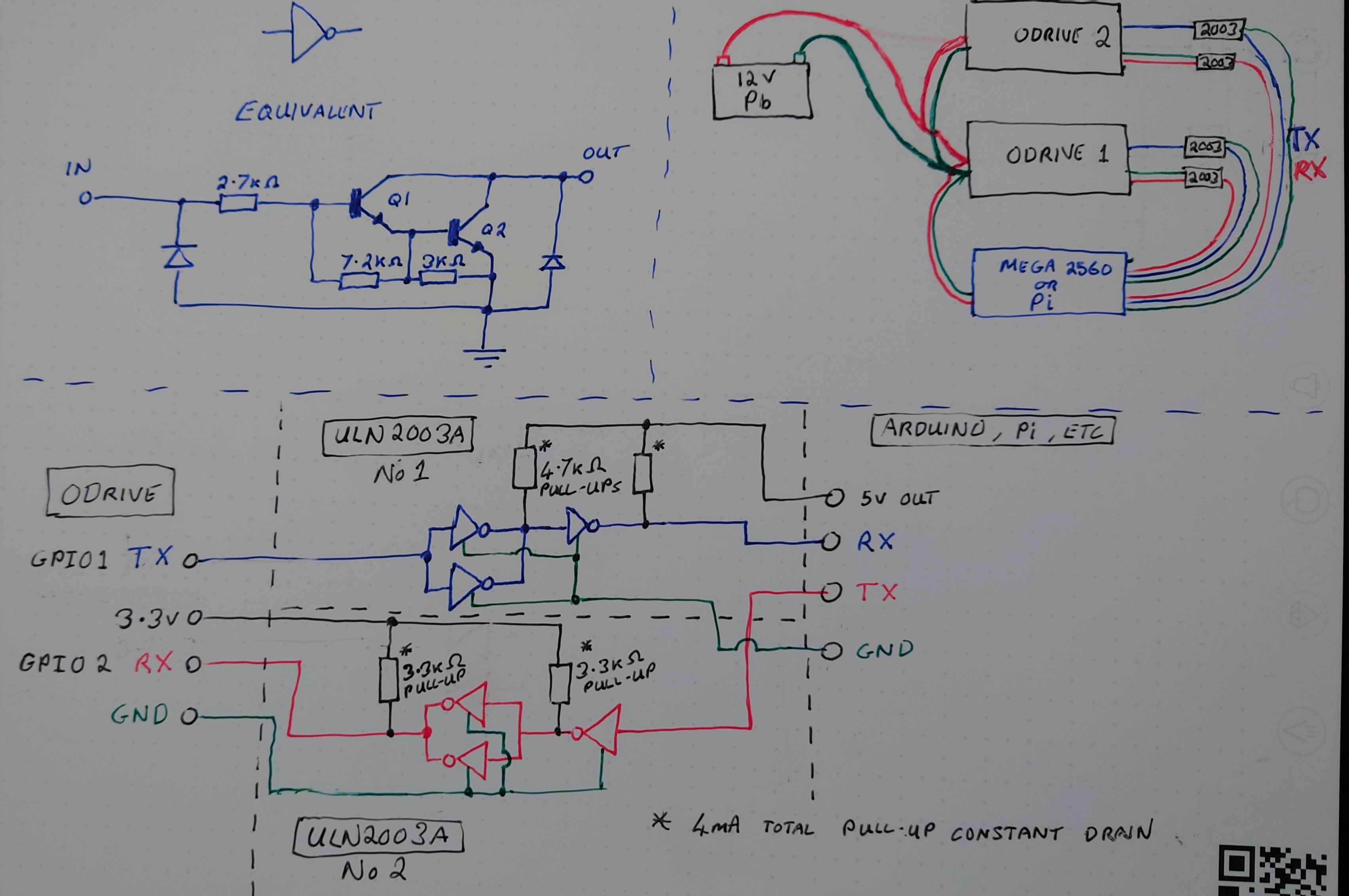
Please forgive the scribblings, but here’s the thought…
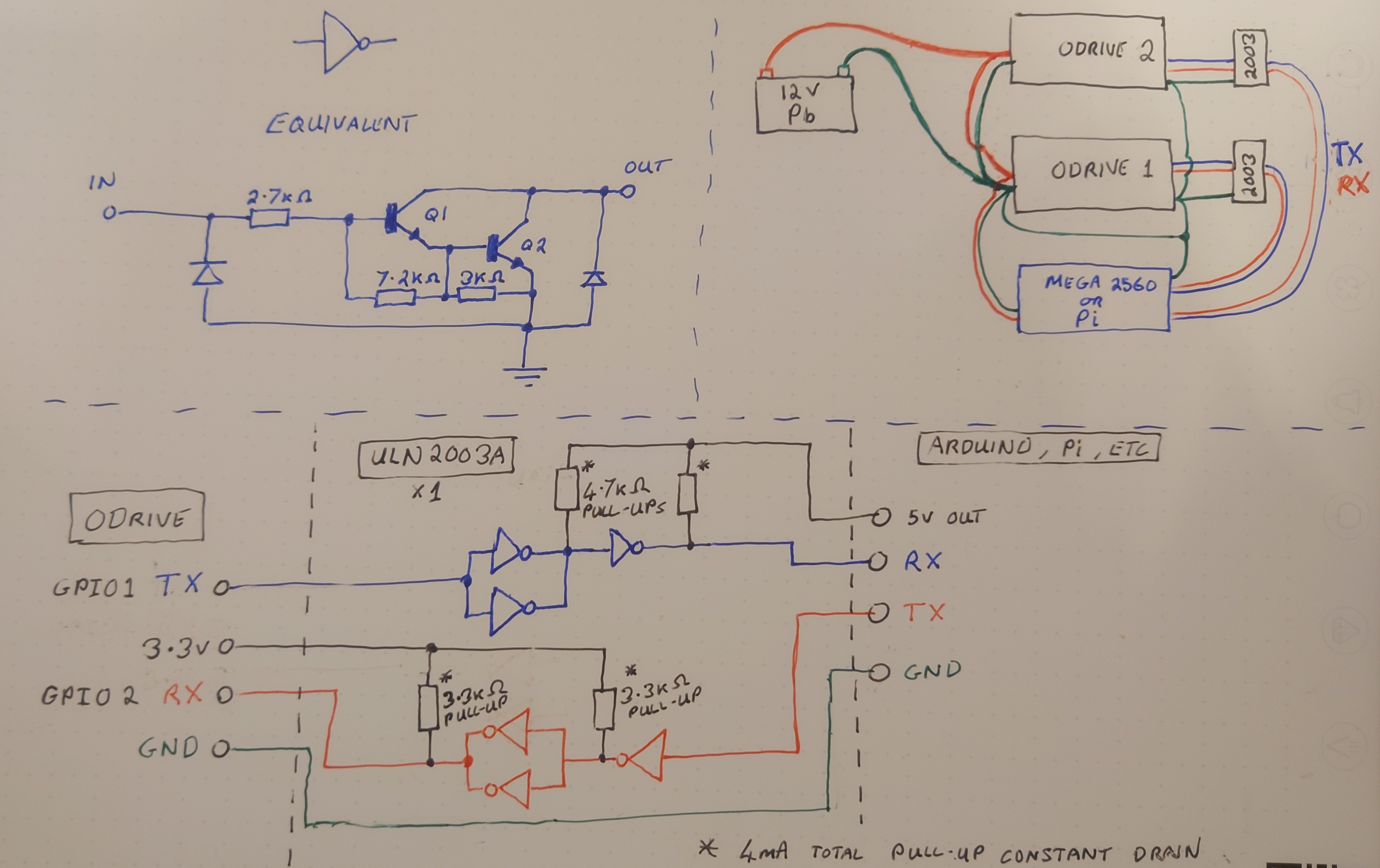
Note: Both Positive and Negative wires were supposed to go to ODrive 1 (it was late
 ).
).
So, for my CNC project I am almost at the point of connecting 2 x ODrives to a 12v battery source and will have both of these directly connected to an Arduino Mega (Serial 1 & 2). Ground loop nightmare?
Well, for power, the battery (12v Lead Acid) will have 8 AWG cable to the first ODrive, then 8 AWG cable from the first to the second ODrive (a few cm’s), power will also go directly from the first ODrive (the one having the highest current draw (spindle motor)) to the Arduino Mega (again short run, although not so drastic as low current) so that any voltage drop is followed by all boards at almost the same rate, minimising current rush between boards. Star earthing will be abundant too…
For Serial comms (for extra protection), use a trusted ULN2003A as shown, where you could just use 1 device for both ODrives as there are 7 darlington pairs, although just doubling up for extra protection (doubling up on those suppression diodes). I’ll use the 5v from the Arduino and 3.3v from the ODrive just to ensure the levels are matched to their own device.
I’ve used these chips for years to great effect, although from another angle you may see something I’ve missed.
What are your thoughts on this one?
Maybe even use them for logic level matching… 
Delete if you think this is completely barmy. I will be testing it out though 
Happy ODriving,
Neil.
P.S. This topic is similar to: -
Understanding the risk of a ground loop
OTS Opto-Isolator for UART Ground Loop
Ground Loops (from ODrive documents).



 )
)